
Space Team| Rising Water
Team Updates

This file contains hidden or bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters. Learn more about bidirectional Unicode characters
| #include <OneWire.h> | |
| OneWire ds(2); | |
| void setup(void) { | |
| Serial.begin(9600); | |
| } | |
| void loop(void) { | |
| byte i; | |
| byte present = 0; | |
| byte type_s; | |
| byte data[12]; | |
| byte addr[8]; | |
| float celsius, fahrenheit; | |
| if ( !ds.search(addr)) { | |
| Serial.println("No more addresses."); | |
| Serial.println(); | |
| ds.reset_search(); | |
| delay(250); | |
| return; | |
| } | |
| Serial.print("ROM ="); | |
| for( i = 0; i < 8; i++) { | |
| Serial.write(' '); | |
| Serial.print(addr[i], HEX); | |
| } | |
| if (OneWire::crc8(addr, 7) != addr[7]) { | |
| Serial.println("CRC is not valid!"); | |
| return; | |
| } | |
| Serial.println(); | |
| // первый байт определяет чип | |
| switch (addr[0]) { | |
| case 0x10: | |
| Serial.println(" Chip = DS18S20"); | |
| type_s = 1; | |
| break; | |
| case 0x28: | |
| Serial.println(" Chip = DS18B20"); | |
| type_s = 0; | |
| break; | |
| case 0x22: | |
| Serial.println(" Chip = DS1822"); | |
| type_s = 0; | |
| break; | |
| default: | |
| Serial.println("Device is not a DS18x20 family device."); | |
| return; | |
| } | |
| ds.reset(); | |
| ds.select(addr); | |
| ds.write(0x44); | |
| delay(1000); | |
| present = ds.reset(); | |
| ds.select(addr); | |
| ds.write(0xBE); | |
| Serial.print(" Data = "); | |
| Serial.print(present, HEX); | |
| Serial.print(" "); | |
| for ( i = 0; i < 9; i++) { | |
| data[i] = ds.read(); | |
| Serial.print(data[i], HEX); | |
| Serial.print(" "); | |
| } | |
| Serial.print(" CRC="); | |
| Serial.print(OneWire::crc8(data, 8), HEX); | |
| Serial.println(); | |
| int16_t raw = (data[1] << 8) | data[0]; | |
| if (type_s) { | |
| raw = raw << 3; | |
| if (data[7] == 0x10) { | |
| raw = (raw & 0xFFF0) + 12 - data[6]; | |
| } | |
| } else { | |
| byte cfg = (data[4] & 0x60); | |
| if (cfg == 0x00) raw = raw & ~7; // разрешение 9 бит, 93.75 мс | |
| else if (cfg == 0x20) raw = raw & ~3; // разрешение 10 бит, 187.5 мс | |
| else if (cfg == 0x40) raw = raw & ~1; // разрешение 11 бит, 375 мс | |
| } | |
| celsius = (float)raw / 16.0; | |
| fahrenheit = celsius * 1.8 + 32.0; | |
| Serial.print(" Temperature = "); | |
| Serial.print(celsius); | |
| Serial.print(" Celsius, "); | |
| Serial.print(fahrenheit); | |
| Serial.println(" Fahrenheit"); | |
| } |

I apologize if there are errors in the text. I'm not good at English.
This file contains hidden or bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters. Learn more about bidirectional Unicode characters
| #include "I2Cdev.h" | |
| #include "MPU6050.h" | |
| #define TO_DEG 57.29577951308232087679815481410517033f | |
| #define T_OUT 20 | |
| MPU6050 accel; | |
| float angle_ax; | |
| long int t_next; | |
| float clamp(float v, float minv, float maxv){ | |
| if( v>maxv ) | |
| return maxv; | |
| else if( v<minv ) | |
| return minv; | |
| return v; | |
| } | |
| void setup() { | |
| Serial.begin(9600); | |
| accel.initialize(); | |
| Serial.println(accel.testConnection() ? "MPU6050 connection successful" : "MPU6050 connection failed"); | |
| } | |
| void loop() { | |
| long int t = millis(); | |
| if( t_next < t ){ | |
| int16_t ax_raw, ay_raw, az_raw, gx_raw, gy_raw, gz_raw; | |
| float ay,gx; | |
| t_next = t + T_OUT; | |
| accel.getMotion6(&ax_raw, &ay_raw, &az_raw, &gx_raw, &gy_raw, &gz_raw); | |
| ay = ay_raw / 4096.0; | |
| ay = clamp(ay, -1.0, 1.0); | |
| if( ay >= 0){ | |
| angle_ax = 90 - TO_DEG*acos(ay); | |
| } else { | |
| angle_ax = TO_DEG*acos(-ay) - 90; | |
| } | |
| Serial.println(angle_ax); // вывод в порт угла поворота вокруг оси X | |
| } | |
| } |

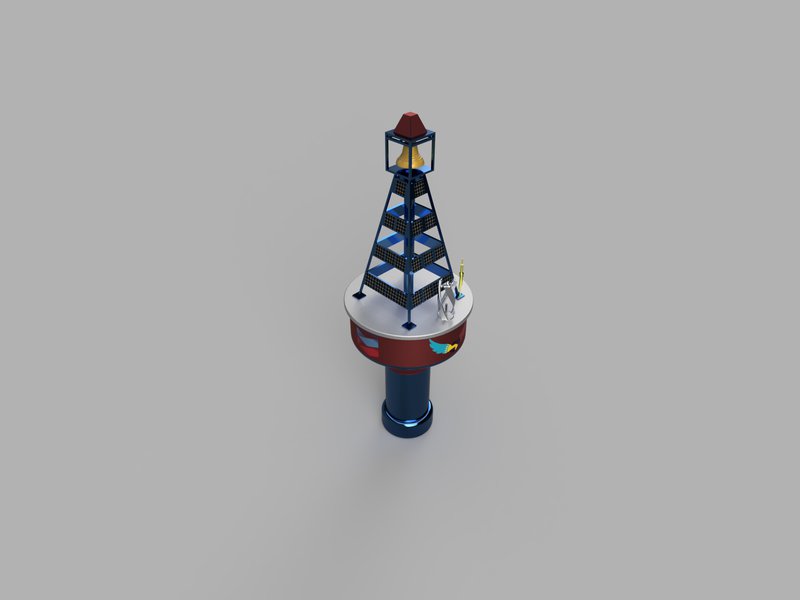
1- light-optical apparatus. 2- sound signal. 3- solar panels. 4- wind generator. 5-housing - main control unit. 6- shank. 7- weighting agent
This file contains hidden or bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters. Learn more about bidirectional Unicode characters
| int trig = 3; | |
| int echo = 4; | |
| int buzz = 11; | |
| int led = 2; | |
| void setup() { | |
| pinMode(trig, OUTPUT); | |
| pinMode(echo, INPUT); | |
| pinMode(buzz, OUTPUT); | |
| Serial.begin(9600); | |
| pinMode(led, OUTPUT); | |
| } | |
| void loop() { | |
| digitalWrite(trig, LOW); | |
| delayMicroseconds(1); | |
| digitalWrite(trig, HIGH); | |
| delayMicroseconds(10); | |
| digitalWrite(trig, LOW); | |
| int t = pulseIn(echo, HIGH); | |
| double s = abs(t * 0.017); | |
| Serial.println(s); | |
| delay(100); | |
| if (s > 90 ){ | |
| tone(buzz, 900); | |
| digitalWrite(led, HIGH); | |
| delay(10); | |
| } | |
| else { | |
| digitalWrite(led,LOW); | |
| noTone(buzz); | |
| delay(10); | |
| } | |
| } |
This file contains hidden or bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters. Learn more about bidirectional Unicode characters
| #include <TinyGPS++.h> | |
| #include <SoftwareSerial.h> | |
| TinyGPSPlus gps; | |
| #define S_RX 4 // Вывод RX | |
| #define S_TX 3 // Вывод TX | |
| SoftwareSerial SoftSerial(S_RX, S_TX); | |
| void setup(void) { | |
| Serial.begin(9600); | |
| SoftSerial.begin(9600); | |
| } | |
| void loop() { | |
| while (SoftSerial.available() > 0) { | |
| if (gps.encode(SoftSerial.read())) { | |
| if (gps.location.isValid()) { | |
| Serial.print("Latitude = "); | |
| Serial.println(gps.location.lat(), 6); | |
| Serial.print("Longitude = "); | |
| Serial.println(gps.location.lng(), 6); | |
| } | |
| else | |
| Serial.println("Location Invalid"); | |
| if (gps.altitude.isValid()) { | |
| Serial.print("Altitude = "); | |
| Serial.print(gps.altitude.meters()); | |
| Serial.println(" meters"); | |
| } | |
| else | |
| Serial.println("Altitude Invalid"); | |
| if (gps.speed.isValid()) { | |
| Serial.print("Speed = "); | |
| Serial.print(gps.speed.kmph()); | |
| Serial.println(" kmph"); | |
| } | |
| else | |
| Serial.println("Speed Invalid"); | |
| if (gps.time.isValid()) { | |
| Serial.print("Time (GMT) : "); | |
| if(gps.time.hour() < 10) Serial.print("0"); | |
| Serial.print(gps.time.hour()); | |
| Serial.print(":"); | |
| if(gps.time.minute() < 10) Serial.print("0"); | |
| Serial.print(gps.time.minute()); | |
| Serial.print(":"); | |
| if(gps.time.second() < 10) Serial.print("0"); | |
| Serial.println(gps.time.second()); | |
| } | |
| else | |
| Serial.println("Time Invalid"); | |
| if (gps.date.isValid()) { | |
| Serial.print("Date : "); | |
| if(gps.date.day() < 10) Serial.print("0"); | |
| Serial.print(gps.date.day()); | |
| Serial.print("/"); | |
| if(gps.date.month() < 10) Serial.print("0"); | |
| Serial.print(gps.date.month()); | |
| Serial.print("/"); | |
| Serial.println(gps.date.year()); | |
| } | |
| else | |
| Serial.println("Date Invalid"); | |
| if (gps.satellites.isValid()) { | |
| Serial.print("Satellites = "); | |
| Serial.println(gps.satellites.value()); | |
| } | |
| else | |
| Serial.println("Satellites Invalid"); | |
| } | |
| } | |
| } |
Всем здравствуйте мы команда Space team. Сегодня 19-го октября мы стали победителями своего региона. Поздравьте нас с победой)
Look at our meteo boei! We won in the Nur-Sultan)