
5people| Trash Cleanup
Project Details
The Challenge | Trash Cleanup
Project Mothership
The project is exploring the ways to clean the waste in the ocean that are mostly plastics. Our solution is to deploy water drones to pick up the plastic waste that is then be put in the mother ship.
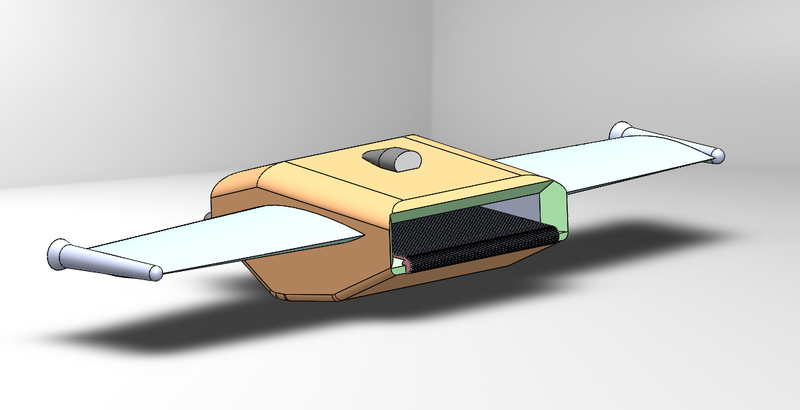
Due to the ocean currents movement, the plastic waste that flows end up in the places where the flow of current is stagnant. As time goes by, the plastic waste pile up to become what is called garbage patches. There are 5 large garbage patches around the entire world. The existing solutions are cleaning up the ocean using the drones, or using a net to round up all the garbage. Our team solution is based on the solution that is come up with clearbluesea.org , which is using water drones and mother ship to clean up the garbage patches. However, for our water drone, we use net to store the garbage waste that is hooked onto the drone. Then, when the drone is full enough, it will go back to the main ship to empty its load and back to its duty. The challenge is that to ensure that drone is manufactured environmentally, and that the task will not further damage marine life. Not only that, we need to make the system to monitor the drones that each ship has when the drones are out in the sea. There will be a main headquarter in land to oversee the ships that are out in ocean.
Project link:
https://tomomii0806.github.io/NASA-project/ (github)
https://drive.google.com/open?id=1il7U5WAccE5tQZuj... (SolidWorks file)
https://docs.google.com/presentation/d/1-CgGRM4oGh... (Google Slides)
Resources:
https://www.clearbluesea.org/meet-fred/
https://svs.gsfc.nasa.gov/cgi-bin/details.cgi?aid=3913
https://www.globalcitizen.org/en/content/wasteshark-plastic-pollution-robot/
https://sloactive.com/plastic-pollution/
https://www.fastcompany.com/40589282/this-sixth-grade-inventor-built-a-robot-to-hunt-ocean-plastic
https://link.springer.com/content/pdf/10.1007%2F978-3-319-16510-3.pdf
https://www.instructables.com/id/Remote-Controlled-Optical-Plastic-Sensor/