
Avengers| Trash Cleanup
Project Details
The Challenge | Trash Cleanup
ocean without garbage
In our project we will be removing garbage from the ocean the robot will identify the garbage to be removed by the suction that will be performed by the robot then store it at the bottom of the robot and it will also remove micro plastic
Water is the most precious gift to humanity by God. It is the most essential need of humans, animals, insects, plants, birds and other living beings for their survival on this planet. About 1.4 billion pounds of trash are dumped into the ocean every year, including sewage, industrial waste and oil spills, killing more than a million seabirds and 100,000 sea mammals each year. For these reasons, we chose trash cleanup to be our challenge to decrease the amount of garbage in oceans that aim to a lot of dangers problems. our challenge is to formulate some key technologies, procedures, and approaches to be used in a mission to help clean up oceanic garbage. We achieve this in our solution by.
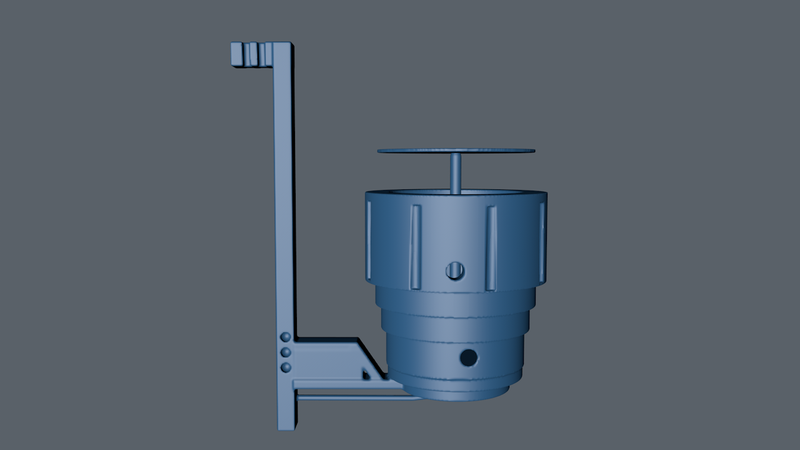
•After research found the best way to remove the garbage from the water and don’t hurt any Sea creatures, we made a robot that can detect the garbage and remove the detected garbage through suction that will be performed by the circular hole above the robot.
Our robot is in the form of a cylinder so we can keep the garbage in the tank of our robot. We will be using that a sensor that is called “ultrasonic sensor.” The ultrasonic sensor measures distance by using ultrasonic waves. The sensor head emits an ultrasonic wave and receives the wave reflected from the garbage. It also measures the distance to the garbage by measuring the time between the emission and reception by this formula:
Distance L = 1/2 × T × C
Where L is the distance, T is the time between the emission and reception, and C is the sonic speed. The value is multiplied by 1/2 because It is the time for the go-and-return distance.
The second piece of hardware is “nodmcu” will receive the detected quantity of garbage in the tank and can calculate the height that garbage reached and send a message to the user when the tank of the robot full.
The second challenge that we are working on is the removing of microplastic (the most common garbage in the ocean). The robot will pump a substance called ferrofluid. Ferrofluid is a mixture of magnetic powder and oil. Ferrofluid will attract the microplastic then, and there will be a magnet inside that comes out of a hole to attract ferrofluid after mixing with microplastic. Every 6 hours, the robot will pump 250 milliliters in stages.
Finally, our robot can solve two dangers problems that causes water pollution (garbage and micro plastic). we can collect garbage by the robot after suction. the second problem we solve it is micro plastic by pumping called ferrofluid.
We thought to provide our project with more efficient technologies and create more advantages so it can be used by a lot of people. We will provide the robot with a remote-control feature. the robot will be able to reach a specific place on its own to pour the garbage that were into it. And We will provide the robot with a piston from inside that compresses garbage to store as much as possible