
Caring for the ocean| Trash Cleanup
Project Details
The Challenge | Trash Cleanup
Oceanic garbage patches are collections of marine debris that come together due to ocean currents; they have devastating effects on ocean ecosystems. Your challenge is to design a mission to help clean up garbage from the ocean!
Caring for the Ocean
Using edge AI to recognize and collect garbage in the ocean. Question define: 1. How to locate the garbage in the ocean. 2. How to clean up the garbage. 3. How to update the current position of garbage cleaner such as Seabean by using edge AI.
背景目的:
海洋佔地球表面的70.8 %,其生態豐富度是遠超陸地的,但在人類發展上,卻因為垃圾的排放導致海洋生態系的危害。為了減少已造成的傷害,海洋垃圾的辨識、蒐集、處理成了當務之急。
面對的挑戰:
- 由於海洋佔地球表面的70.8 %,所以能理解為海洋是遍及全球的,但海洋之大,要找到海洋垃圾帶並知道相對的經緯度是面對的困難之一。
- 現今的海洋垃圾清除及偵測設備通常有以下問題:易投放但難回收或損毀率高,所以投放之回收及減少損毀率即是面對的困難之二。
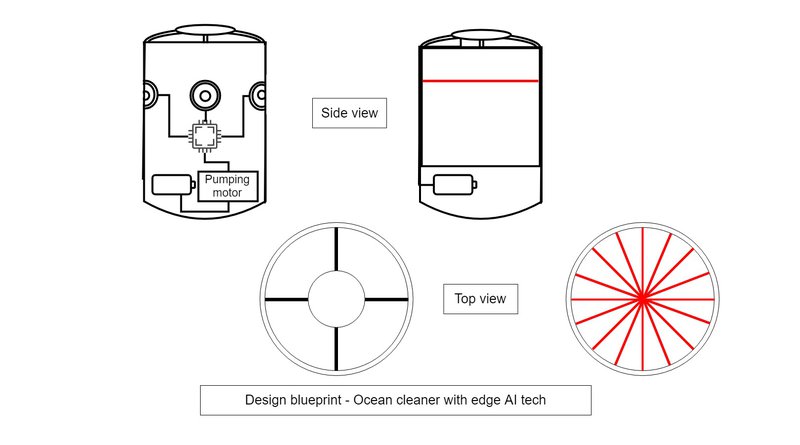
- 海洋垃圾清除讓我們團隊想到'Seabean',藉由馬達幫浦吸海水造成流動使垃圾流入桶中,但其設計會有嚴重的能源消耗問題(馬達很耗電或燃料),所以團隊想運用edge AI技術減少能源消耗問題,而其中的設計也成為了面對的困難之三
解決挑戰發想:
- 從NASA網站"https://svs.gsfc.nasa.gov/4174"之中能發現:垃圾在漂流生涯中會匯集至5大海洋垃圾帶,從中發現其成像方式是藉由浮標發送訊號。在浮標中又找到NASA的 "Behrenfeld_08-74_report-rev121908" 表單"SeaBASS" 資料,發現藉由兩者交叉比對可以帶略推敲出5大海洋垃圾帶的概略經緯度。
- Seabean 是個不錯的海洋垃圾清除裝置對於其能源消耗問題,首先可以從抽水幫浦下手。若能在其需要收集垃圾時才開啟抽取就能解決能源消耗問題,而其中構想就需要運用edge AI協助。
構想如下:
<1>運用edge AI的模型在解決影像辨識上可以做到實時回應的特性,使搭載edge AI技術的板子搭配GPS、網路模組及攝影鏡頭4個讀取周圍海域是否有疑似垃圾圖像,若有則發送訊號給抽水馬達並開啟。
<2>由於edge AI技術的板子需要供電才能使用,故設計在海洋垃圾桶蓋上方加裝太陽能板,白天放置在海面上時主要由太陽能板所收集到的電提供給海洋垃圾桶,而當攝像頭攝取的照片中無垃圾含量時,則會將太陽能板蒐集的電力存在鋰電池中;若啟動海洋垃圾桶的時間是接近黎明時,由於太陽能板無法及時攝取足夠的電力供設備使用,這時則是透過鋰電池來提供電力給海洋垃圾桶運作,而鋰電池能提供的電力時間則是由太陽能板充電的時間多寡來做決定。
<3>由於設計是基於垃圾桶而不是無底洞,故無法一直收納垃圾,因此我們會在離海洋垃圾蓋20公分裝上8組紅外線設備並藉此判斷目前已經裝了多少垃圾量,當紅外線接收端的數量超過一半(含)以上時未接收到訊號時,會被判斷目前海洋垃圾桶已經無法再收納垃圾,並停止海洋垃圾桶的所有功能並藉由GPS及網路模組發送資料給相關人員。此構想不僅減少能源消耗(運用綠能)也解決難回收等問題。
如Project images所示。
目前進度及遇到瓶頸:
目前進度:
蒐集海洋垃圾影像資料:91張海洋垃圾樣張,由於資料過於少故用影像處裡的方式,將影像分割成50pix X 50pix的影像資料,並由左上、右上、左下、右下四個方向做切割做資料拓展(對影像資料而言只要任意bit數不同皆能認為不同資料,且也有一定上的形態學)從91->3434張海洋垃圾樣張。
由色彩學的理解,海洋中的塑膠垃圾大多是偏白色居多,與海洋的偏藍色或綠色的顏色差在R值的不同。藉由此特性可以為驗證資料大致分為塑膠垃圾或海洋。
https://github.com/k561001g30/image-processing.git <--Project DEMO
遇到的瓶頸:
edge AI的搭建環境是在比賽當天(周六早上)才搭建成功,故在培養AI模型及其中網路層數、權重、簡化網路、在寫手機APP驗證等部分都尚未完成(時間瓶頸)。
由於發想所設計的內容大多為硬體或材料科學方面的背景再加上組員皆為軟體背景,故無法在設計圖上標記實際材質、配線、技術評估等等(技術瓶頸)
開發技術及感謝:
進度部分:Visual studio 2012 C#
edge AI: 聯發科 NeuroPilot 、tensorflow
感謝聯發科技術分享及贊助