
Trash DrAIn| Trash Cleanup
Project Details
Awards & Nominations
Trash DrAIn has received the following awards and nominations. Way to go!
The Challenge | Trash Cleanup
Trash DrAIn
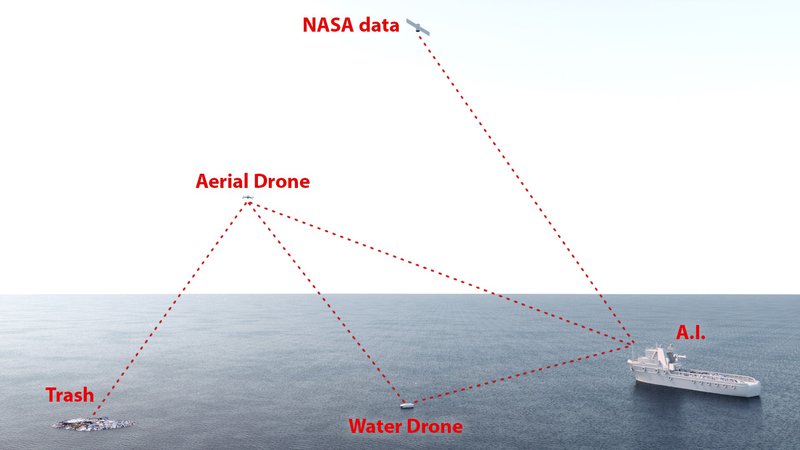
We propose the deep training of an A.I. through genetic algorithms, to make full use of Nasa Earth data and other sources, and help to clean the oceans with the combined use of air and water drones.
If there is a problem on the video here are some other links where you can see it:
https://www.youtube.com/watch?v=0eoONzZnaZo
Trash DrAIn
Introduction
We are Trash DrAIn. Our team wants to create the software that can clean the oceans. Combining existing technologies for this purpose we want to use AI and Machine Learning to link and coordinate ocean mapping companies and ocean cleaning companies to ensure that they will be able to cooperate at the highest rate.
As individuals we were always conserved about the amount of single-use plastic that we consume and throw away. So, we were amazed when we found out that there are hundreds of thousands of tons of plastic at the oceans. Since it is almost impossible to collect the microplastics we thought that cleaning the big pieces before they disintegrate is the best option to stop microplastics’ formation. So we created a software that combines our fields of education -Electrical and Computer Engineering, Architecture and Economics.
Info about the amount of debris in the seas:
- https://www.ranker.com/list/worlds-biggest-ocean-g...
- https://en.wikipedia.org/wiki/Dijkstra's_algorit...
- https://www.thecrazyprogrammer.com/2014/03/dijkstr...
Functionality of the system
Step1:
NASA’s Data
Collect data from the Nasa’s Satellite and database to locate currents in the ocean in order to identify specific locations where we can find big amounts of trash.(Of course other open source data like LITTERBASE, Plastic Adrift, Plastic Pollution etc. can be used)
Step 2:
The flying drones
These drones take pictures of the area, collect data and send them to our Control Center in order to process them with the help of the AI. The AI then detects each object in the pictures, it isolates it and distinguishes it in the database in 4 different categories, Litter, Sea, Marine Life and Vessels.

Step 3:
The Aqua Drones
We sent aqua drones close to these locations. At this point we are going to collaborate with companies that have aqua drones (or manufacture them, such as RanMarine) and incorporate our AI to them.
Companies we can cooperate with:

Further Analysis:
Control Center
This is where all the procedures on how we collect the data. Our AI and the drones will cooperate in order to clean our oceans/lakes/harbors/rivers.
We separate the area in grid blocks and create a database where the coordinates of each block will be stored. Every block will have the info of currents and the amount of trash exists in that specific grid block.
So every block will have its own value, which will be calculated through a function such as: value = f( currents_info, concentration_of_data).
In case of cleaning an ocean (where we deal with a large amount of garbage, ex. Great Pacific Garbage Patch) we need to have a ship where all these procedures happen, a MotherShip.
In order to reach our destination more efficiently, the MS will use the grid blocks which will be included in larger area blocks, where the value of every area will be the sum of its own grid blocks.
Every area will, hypothetically, be a node, and the weight of the edgeto get there will have the value of the node, but reverse (1/val). In this way we will create the system we want in order to use the Djikstra’s Algorithm, so the most significant path will be the one with the smaller weight of edge, just as expected by the algorithm in order to work.
Info about Djikstra’s Algorithm:
- https://en.wikipedia.org/wiki/Dijkstra's_algorit...
- https://www.thecrazyprogrammer.com/2014/03/dijkstr...

When the MS gets to an area our software will calculate how many drones are needed in order to clean the trash, calculating it by the amount of trash there are in the larger area block and the amount of trash they can store. Afterwards, every drone will have its own grid blocks which will clean.
Every time the MS cleans an area block it updates its database using the amount of trash it cleaned and the amount of trash recorded by the aqua drones that may have been left behind as well as information about the currents of the water in the area block.
The Aqua Drones
Each aqua drone will have its own blocks of action, it will update its own database through the Control Center (or MS) with the info of the blocks it cleans. It will choose the block it will clean by the max value of every block close to where the drone is.
The Aqua drones will use infrared pulses to drive away the marine life near them in order to avoid hurting it.
Then it will detect and absorb the trash it can get from that block until it gets to the next block it already chose. When the drone will be close to the mothership the most important thing will be the concentration of data. While the drone gets further of the MS, the importance of currents info and the distance that can be covered by the drones (depends on fuels and plastic weight) will get higher.
Simultaneously, it will check the distance it can cover, including factors such as energy (fuels), the weight of trash it already has and the weight it will get while it returns to the Control Center. When it decides to return and it will create a path using the Djikstra algorithm the way we explained before.
It will discharge its cargo of trash, then it will charge to regain the energy it needs and maintain it if needed. Then it will start its trip again.
Drone’s Features
Area and Aqua Drones will be equipped with a set of features that will collect information, which will be used by our AI ,so as to help them do their task most efficiently.
- GPS locator: so that NASA’s Satellites will know their location and help the AI’s algorithm to be applied.
- Cameras: so the Drone will identify their targets (the garbage).
Also, a few features specifically for the Aqua Drones:
- Environmental Sensors: depth, temperature, water quality
- Infrared Pulse Generator: this device will help drive away any marine life near the drones so no fish will get harmed.
- Camera with Infrared Heat sensor (OPTIMAL): as a backup plan for any fish remaining in the Aquadrones’ area of operation.
Of course, some of these features exist or can be added to already existing functional drones in the market like WasteShark and others.

AI’s Adaptability:
During the collection of the trash we will update our database and NASA’s database, becoming more accurate and provide better information in the future. The mothership and drones will have better choices on which area block/grid block is better suited to be cleaned first.
ENERGY
Both Aqua and Air drones will use batteries and have a backup reservoir of natural gas fuel.
The Control Center (or MotherShip) will have solar panels, with a chance of using wave power too, in order to charge the drones. In the case of the MS it will charge the drones while it will move on to the next area block.
Benefits of our prospect:
- Already existing technologies:
- Nasa’s Satellite data
- Flying and aqua drones (that can be updated with more sensors)
- Tanker (MotherShip)
- A.I.
- Using our A.I. will result in making our system more and more effective in the course of time
- Uses solar-wave power for charging the drones which is eco-friendly ☺
- It is scalable. The logic of the system can be effective at harbors, lakes andthe end of the rivers where most of the trash are. They are actually the main source of ocean pollution.
Expected Results:
- Short-Term: Cleaning the accumulated trash and debris we benefit the marine life immediately.
- Long-Term: By cleaning ports, end of city’s sewer system, end of rivers we strike in the heart of the problem, because these places are the source of trash in the seas and oceans. We reduce the danger of corrosion of plastic into micro-plastic, which cannot be detected and as a result cannot be collected.
Future Plans
The software we are creating must always be evolving. So, we need to constantly try to find better ways to streamline the algorithm and make better predictions about the equipment needed.
And a little bit of coding…
Control Center - Mothership:
Collect data (NASA, drones) and set/update database;
Separate drone sectors;
Send pass them the data
Send the drones to clean
DRONES:
If( weather == OK){
If ( capabledist( fuels, weight) – backup(backfuels,weight) <dist(Da , MS){
V1 = val( Σf(currents, ρ(coordinates1));
V2 = val( Σf(currents, ρ(coordinates2));
.
.
Go to coordinatesx = max{V1,V2,… };
Analysising data of trash in grid and update database and collect garbage;
}
Else{
Go back to MS using Djikstra.
}
}else {
Saving energy mode
}
MORE INFO:
Since our AI will evolve, adapt and cooperate constantly with NASA’s Satellite data it will be able to adjust its cleaning process to multiple ways and situations.
Scale:

- Big Scale: The Mothership and the Drones will aim to clean garbage and debris from big areas such as: the Great Pacific Garbage Patch, the North Atlantic Garbage Patch, the South Pacific Garbage Patch,the Indian Ocean Garbage Patch, the South Atlantic Garbage Patch etc..

- Small Scale: The AI’s fleet will clean ports, rivers, lakes etc..
Sources:
- https://en.wikipedia.org/wiki/Great_Pacific_garbag...
- https://en.wikipedia.org/wiki/Dijkstra's_algorit...
- https://www.thecrazyprogrammer.com/2014/03/dijkstr...
- https://www.ranker.com/list/worlds-biggest-ocean-g...
- https://www.ranmarine.io/wasteshark
- https://2019.spaceappschallenge.org/challenges/ear...
- https://litterbase.awi.de/
- http://plasticadrift.org/