Space Speologist| Eeny, Meeny, Miney, Sample!
Team Updates

“SPACE SPEOLOGIST”
MEMBERS
Victor Uriel Ozuna Hurtado, Jorge Félix Jiménez Briones, Aurora Silvana García Avalos, Guadalupe Amor Lerma, Bernardo Jael Lizárraga Aguilar, Mario Alberto Ruiz Ibarra, Amairany Carolina Ramírez Cruz, Karla Adana Guadalupe Corona Polanco, Félix Nicolas Gutiérrez Beltrán, José Antonio Del Ángel Ríos, Juan Carlos Arriaga Oliva, Juan Carlo Petrina Bernal, Edgar Veliz Mendoza.
THE CHALLENGE
You are the astronaut/robotic mission lead tasked with bringing valuable specimens from the Moon back to Earth for further study. How will you evaluate lunar samples quickly and effectively before or while still on the mission? How will you differentiate samples of potential scientific value from less interesting material?
POTENTIAL CONSIDERATIONS
For your solution, devise a simulation of a human/robotic mission to the Moon that brings back only the most valuable specimens, and not "extra" material. Be sure to articulate how you are defining “value” in your mission – what purpose do the samples serve, and what characteristics make them “valuable” to you? Remember that value is not necessarily a monetary value, but the collection and return of any sample to Earth does have a cost to it, so your task is to be sure that you are working with the most important samples you can collect.
Some examples of solutions include (but are NOT LIMITED to):
- Describing a novel way to robotically explore and obtain samples ahead of time
- Designing tools for the crew to inspect in-situ and select/cut/core the samples or rocks that are most valuable.
- Proposing a robotic mission to be flown that adapts Mars 2020 robotic capabilities to lunar surface missions so as to make the best use of astronaut time on the moon
- Exploring tools to obtain samples (e.g., a hand-held core drill, sample cutting tools, etc.) and nondestructive evaluation (NDE) inspection technologies such as 3D X-ray, X-ray Fluorescence (XRF), Scanning Electron Microscopy (SEM), Neutron Spectrometry, and others to be used on either human or robotic missions to get the most value per pound returned to Earth.
- Developing a ‘scouting’ robot may be tasked to find what areas to send the astronauts to for gathering samples.
- Designing a system to extract primary science data from the samples without the need to bring them to Earth for further study.
- Crafting whatever your brilliant minds can imagine!
Your solutions will be evaluated for the following metrics:
- Hours of astronaut time saved.
- Hours of extravehicular activity (EVA) astronaut time saved.
- Percent increase in value per pound of rock/soil leaving the Moon for Earth.
- Mass of rock/soil not returned because its value was determined in-situ.
- Use of mature systems – minimizing development and efforts to make them “space ready.”
Here are some tips to consider as you develop your solutions:
- Raw samples may be rocks, rock fragments, core samples, or dust.
- Interesting zones for obtaining samples may be considerable distances from a landing site.
- Some craters can be very dark and cold and may have steep sides.
- Processed samples may need to preserve stratification; or, they may only need to include general mineral content.
- Samples that can be evaluated as they are gathered may add efficiency.
DEVELOPMENT
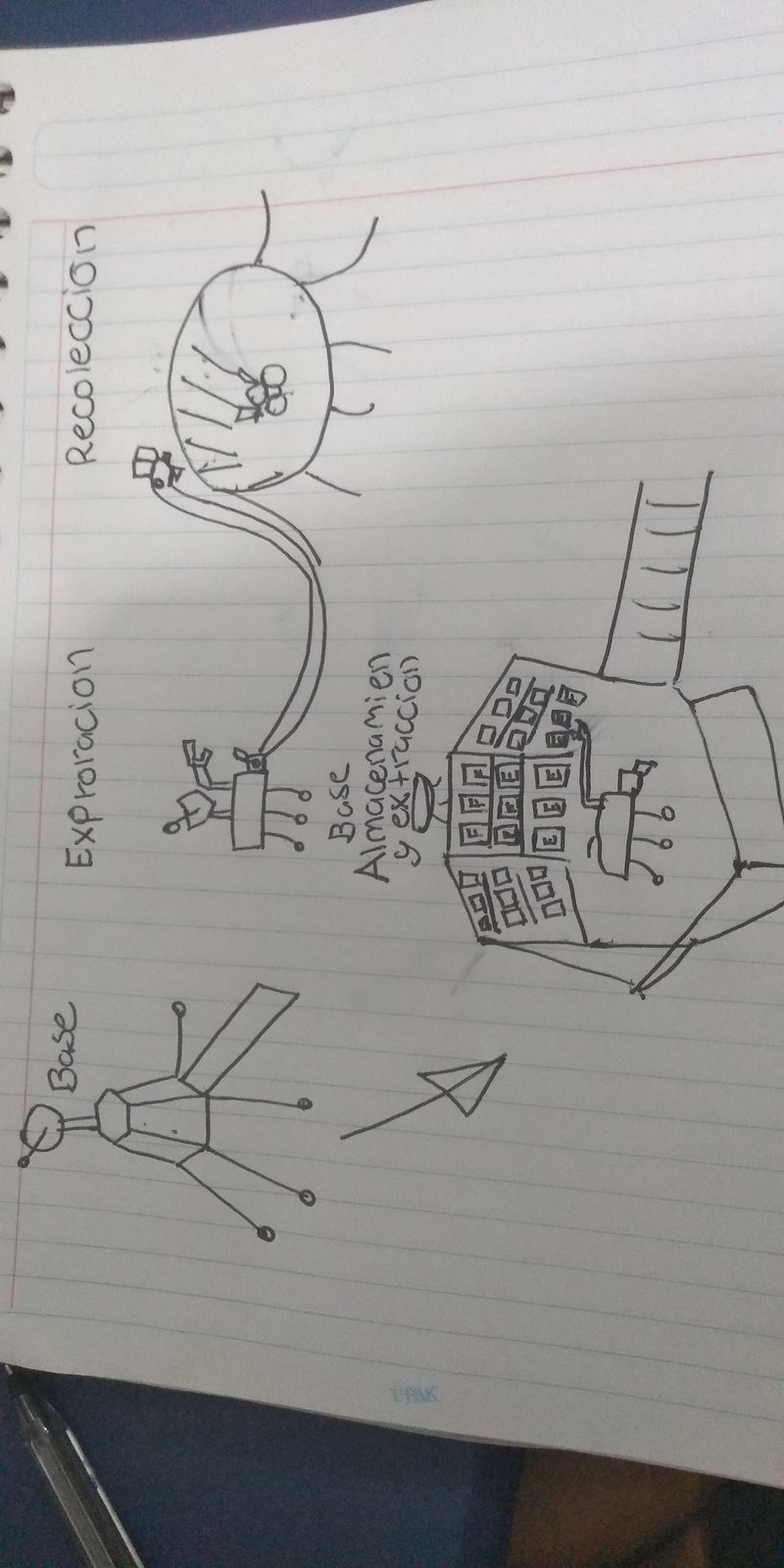
In this project we will be developing an improvement for a Rover robot, which will be responsible for the exploration and collection of minerals in caves or places inaccessible to Rovers as craters. To this improvement we decided to call it: “O.T.E.C.” (Objeto Terrestre Explorador de Crateres) which means crater explorer earth object This improvement consists of a hybrid robot based on the physiology of a snake since a snake can maneuver better than rover in narrow and rocky spaces due to its agility, this Rover improvement will be implemented from a gear system. The Rover will have a winch where the snake will remain, the snake will have its own movement through a fabric that we are designing from electro-active polymers which will be deformed with an electric charge, so that the material emulates the movement of the muscles of a snake, which will allow us to move.
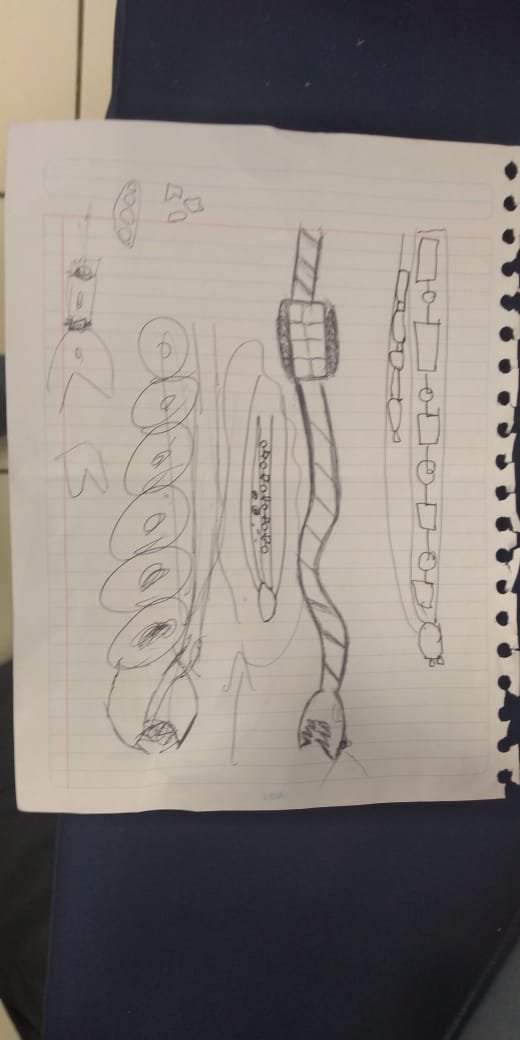
O.T.E.C.
- Head: This will have density and heat sensors in order to identify the minerals closest to the surface by the density level, a camera and lamp responsible for transmitting what is happening so it could also be changed to manual mode to handle it by the NASA.
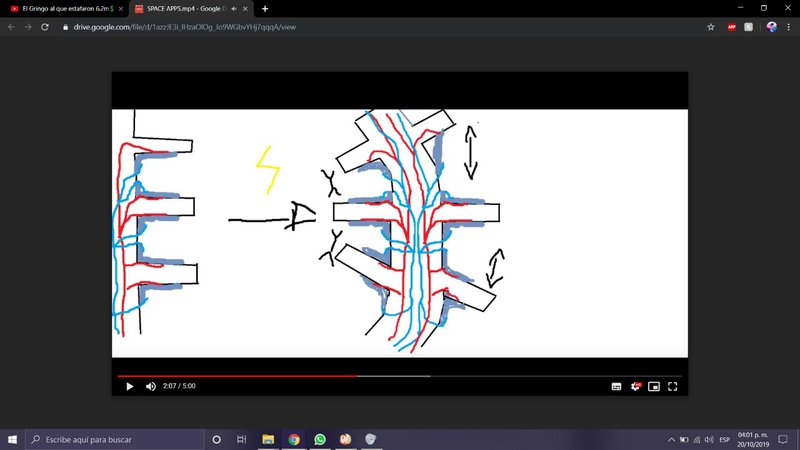
- Fabric: This fabric will consist of carbon nanotubes and graphene allowing the deformation of the fabric to emulate the movements of a snake as well as peristaltic movements to make a successfully movement of the minerals.
- Mouth: The mouth is the most important part in the process of mineral collection, which will have titanium drills with diamond tip, responsible for crushing the ore to be able to transport it back to the Rover.
- Digestive tract: This is where the collected minerals will pass, taking them to the base simulating peristaltic movements with the electroactive polymer fabric.
- Skeleton: We will emulate a skeleton that carries cables that electrify the electro-activated polymer fabric, because the moon has high temperatures, we decided to use materials that can resist such as carbon fiber and fiberglass.
- Astronaut suit: This will be covering the skeleton, electroactive fabric and digestive tract. Since we don't know how they will react to the temperatures of the moon and the radiation in it.
- Skin: It will be designed from the wheels of the Rover that are made of a titanium and nickel alloy that has flexibility, grip and resistance to be able to do the scans avoiding damage to the internal system of the O.T.E.C.
- Varnish: This will be made up of ceramics and plastics preventing the sand that is on the moon from adhering, as it could damage the O.T.E.C.
- Electromagnetic system: This will be responsible for removing the small residues of sand that could remain since this sand is very harmful as humans and aerospace systems.
- Camera of analysis: here is where the mineral will be clean it to put them back in a clean environment to bring it back his purity to see the composition of it.
That is our innovation to solve the problematic of extracting the mineral from a narrow path or out of the reaching places. Now we will be talking about the extraction for an exhaustive analysis of the mineral. Since this is a new improvement for the Rover, we do not know exactly how many time it will be saved, because there no other rover that could explore a cave or crater yet. Other opportunity area will be that an astronaut won’t be having to risk his life exploring cave due to radiation or possible cuts in the suit.
The Rover will place the samples in a capsule located between two exoskeletal systems to maintain inertia (each one will contain 500 grams of minerals in order to save some money) back to the spacecraft, it will be responsible for storing all samples for be able to analyze them Inside there will be a density meter to know when the capsule is filled, OTEC will be connected by a long power cable that will always keep you in control of the rover. When the Rover is filled with samples, it analyzes them within itself, and then discards them.
The collected data will be sent to the NASA database, and the molecular reader inside the rover will be depressurized inside so as not to affect the following collections.
Where does the idea come from, where did it originate?
This idea it came with the finality of exploring caves in mars, and it came through a lot of changes since in the beginning we were thinking about doing a drone that fly into a cave to explore, but we had a rain of ideas that help us to decide taking the physiology of the snake to make a real innovation.
What passion motivated you?
I’m going to be talking for everyone when I’m said that what move us to join in this project it was the love for the science.
What problem are you solving? For what?
We are solving the problem of collecting samples in places never before explored and with greater speed
With what purpose?
The purpose is to try to fully comprehend what are the minerals in the moon also to see how possible is to achieve this in mars
What are the opportunities?
With this Rover we have the opportunity of approach to this material that were out of reach due to the technology in this time
How does your idea work?
through an exoskeleton similar to that of snakes, we will put electroactive polymers between the vertebrae, density sensors, cameras and drills.
IT IS POSSIBLE TO ACHIEVE IT! JUSTIFICATION
By cause of what we have in mind is not out of logic and its just an improvement to a Rover that already exist, and we are taking as an example the winch of a jeep, but the cable will be filo guided.
We believe that this project has a lot of potential an is a big and great innovation in the view of the NASA seeing that is looking forward to going back to the moon 2024.