
XYZ Code| Out of This World!
Team Updates

Dia 3/3 XYZ Code Team
A
Adriana Garcés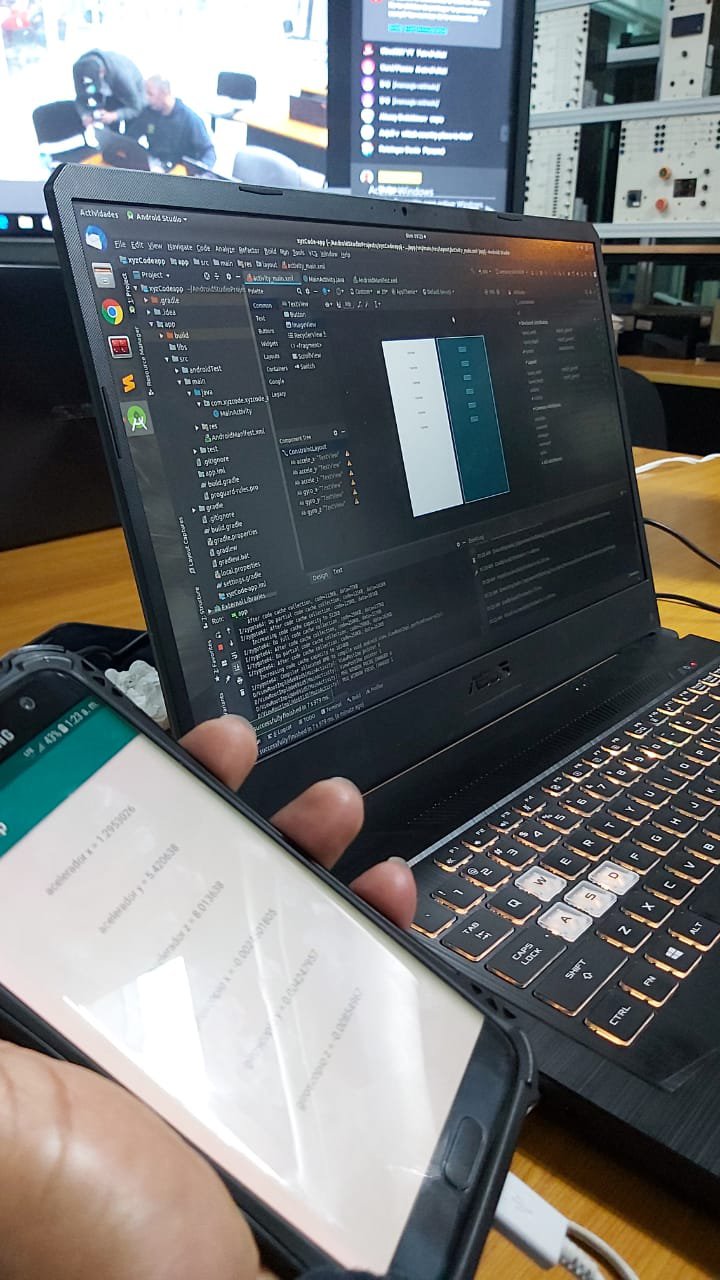
D
Dann Blake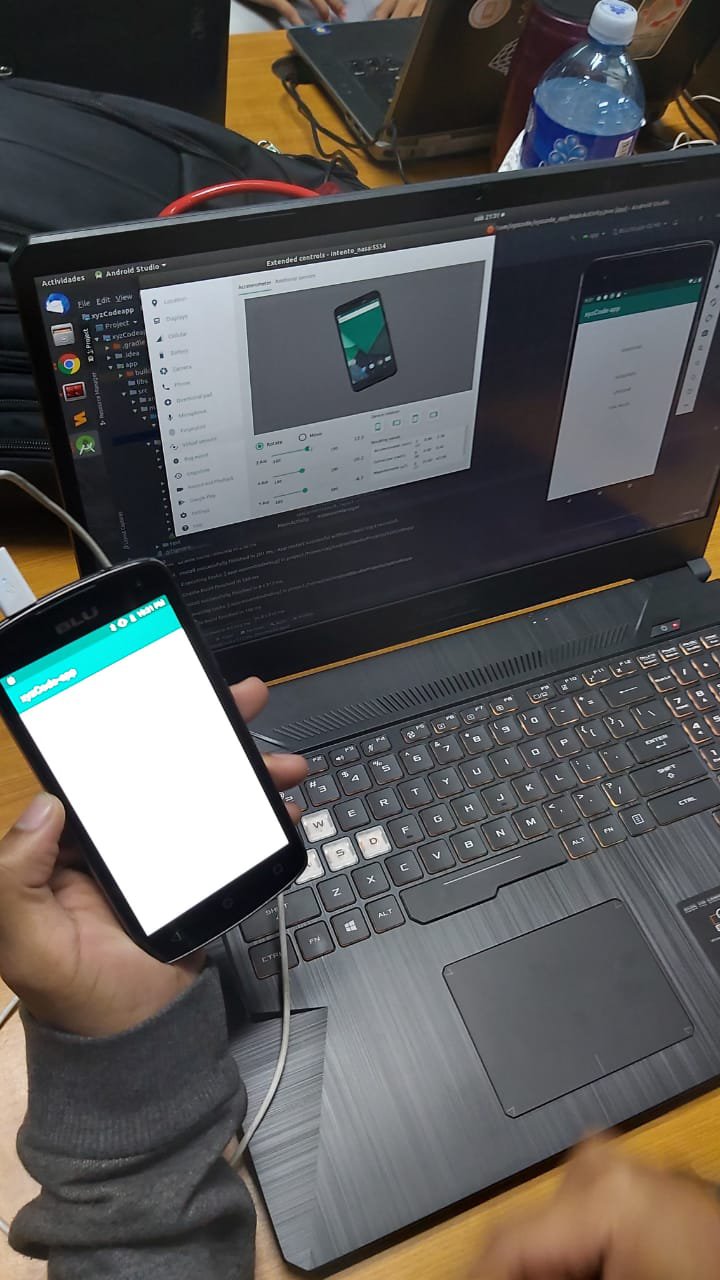
Desarrollo del APK para el uso del Drone
D
Dann Blake This file contains hidden or bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters. Learn more about bidirectional Unicode characters
| # Authors: | |
| # * XYZ Code Spaceappchallengepty | |
| # | |
| importsys | |
| fromstd_msgs.msgimportString | |
| fromstd_msgs.msgimportEmpty | |
| fromsensor_msgs.msgimportCompressedImage | |
| fromgeometry_msgs.msgimportTwist | |
| importrospy | |
| fromar_drone_wrapper.msgimportNavdata | |
| fromimutilsimportpaths | |
| importnumpyasnp | |
| importimutils | |
| importcv2 | |
| fromlibardroneimportardrone | |
| frommultiprocessingimportProcess | |
| importtime | |
| drone=None | |
| pub_nav_data=rospy.Publisher("/ardrone/navdata", Navdata, queue_size=1) | |
| front_image_pub=rospy.Publisher("/ardrone/front_camera/raw_image_compressed", CompressedImage, queue_size=10) | |
| defimages(drone): | |
| rospy.loginfo("Image info thread") | |
| ifdrone: | |
| drone.set_camera_view(True) | |
| msg=CompressedImage() | |
| msg.header.stamp=rospy.Time.now() | |
| msg.format="jpeg" | |
| compressed_images=cv2.imencode('.jpg', drone.get_image()) | |
| msg.data=np.array(compressed_images[1]).tostring() | |
| front_image_pub.publish(msg) | |
| datos=dict() | |
| datos=nav_data(drone) | |
| print(datos[0]) | |
| else: | |
| rospy.loginfo("No inicio") | |
| defnav_data(drone): | |
| ifdrone: | |
| nav_data_drone=drone.get_navdata() | |
| data=nav_data_drone | |
| else: | |
| rospy.loginfo("No data to publish") | |
| return (data) | |
| defcmd_vel(move_data): | |
| globaldrone | |
| ifmove_data.linear.x==-1: | |
| drone.move_right() | |
| elifmove_data.linear.y==1: | |
| drone.move_forward() | |
| elifmove_data.linear.z==1: | |
| drone.move_up() | |
| elifmove_data.linear.x==1: | |
| drone.move_left() | |
| elifmove_data.linear.y==-1: | |
| drone.move_backward() | |
| elifmove_data.linear.z==-1: | |
| drone.move_down() | |
| elifmove_data.angular.x==-1: | |
| drone.turn_right() | |
| elifmove_data.angular.x==1: | |
| drone.turn_left() | |
| #nuevo agregado | |
| elifmove_data.angular.y==2: | |
| drone.takeoff() | |
| elifmove_data.angular.y==-2: | |
| drone.land() | |
| elifmove_data.angular.z==2: | |
| drone.reset() | |
| elifmove_data.angular.z==-2: | |
| drone.hover() | |
| images(drone) | |
| deftakeoff(_data): | |
| globaldrone | |
| drone.takeoff() | |
| drone.hover() | |
| defland(_data): | |
| globaldrone | |
| drone.land() | |
| defreset(_data): | |
| globaldrone | |
| drone.reset() | |
| defmain(args): | |
| globaldrone | |
| rospy.init_node('control_driver', anonymous=True) | |
| rospy.loginfo("Starting drone connection") | |
| drone=ardrone.ARDrone(True) | |
| rospy.loginfo("Connection Success!!") | |
| drone.reset() | |
| cmd_vel_sub=rospy.Subscriber("/ardrone/cmd_vel", Twist, cmd_vel, queue_size=1) | |
| takeoff_sub=rospy.Subscriber("/ardrone/takeoff", Empty, takeoff, queue_size=1) | |
| land_sub=rospy.Subscriber("/ardrone/land", Empty, land, queue_size=1) | |
| reset_sub=rospy.Subscriber("/ardrone/reset", Empty, reset, queue_size=1) | |
| try: | |
| rospy.spin() | |
| exceptKeyboardInterrupt: | |
| drone.halt() | |
| nav_data_thread.terminate() | |
| print"Shutting down ROS ARDRONE DRIVER module" | |
| if__name__=='__main__': | |
| main(sys.argv) |
A
Adriana Garcés
Dia 2/3 equipo XYZ Code
A
Adriana Garcés
XYZ Code Dia 1/3
A
Adriana Garcés
Dia 1/3 equipo XYZ Code
A
Adriana Garcés