
AccWire Innovations| Trash Cleanup
Team Updates
#include <Pixy2.h>
Pixy2 pixy;
int c;
void setup()
{
pinMode(3,OUTPUT);
pinMode(4,OUTPUT);
pinMode(6,OUTPUT);
pinMode(7,OUTPUT);
Serial.begin(115200);
Serial.print("Starting...\n");
pixy.init();
}
void loop()
{
int i;
pixy.ccc.getBlocks();
if (pixy.ccc.numBlocks)
{
Serial.print("Detected ");
Serial.println(pixy.ccc.numBlocks);
c=pixy.ccc.numBlocks;
if(c==1){
Serial.println("Hurray!");
delay(500);
digitalWrite(6,HIGH);
digitalWrite(7,LOW);
delay(6000);
digitalWrite(6,LOW);
digitalWrite(7,LOW);
// delay(1000);
}
}
}
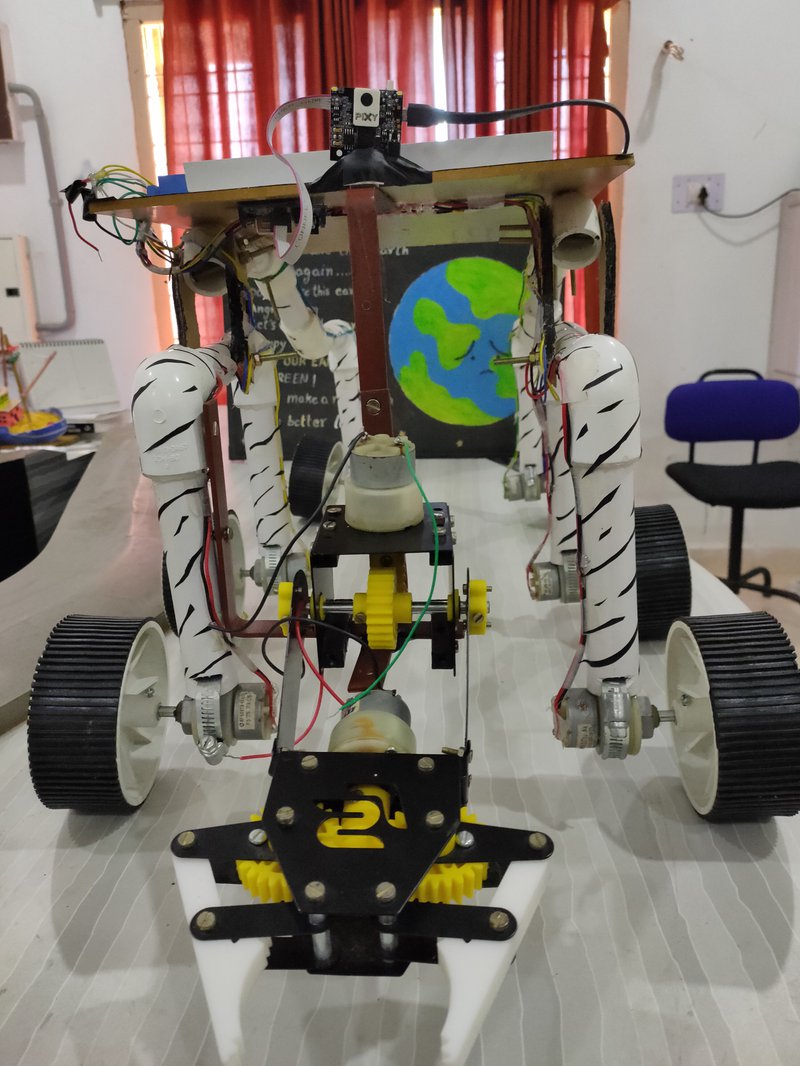
Final Design

On field.

Finally designed the robot. Kudos to @Sandhya @Keerthika
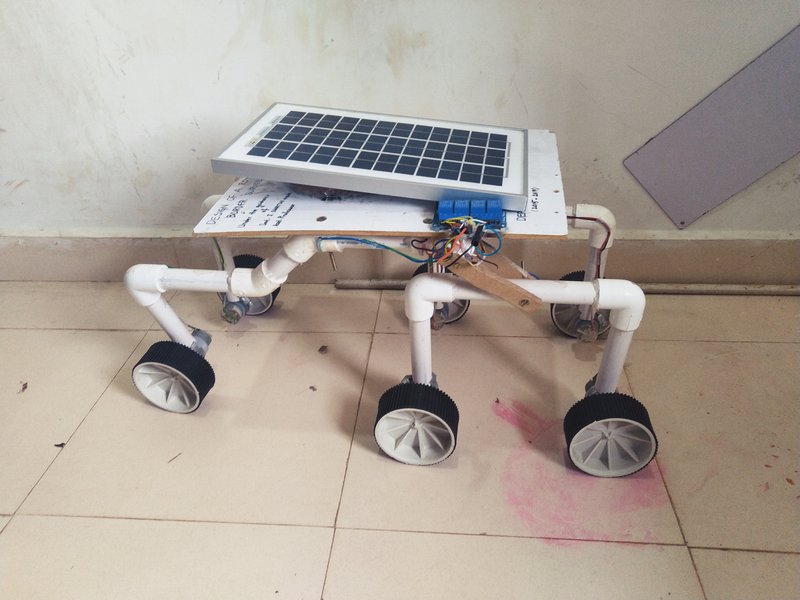
Earth Rover is getting ready.