
Ocean’s 4| Trash Cleanup
Project Details
Awards & Nominations
Ocean’s 4 has received the following awards and nominations. Way to go!
The Challenge | Trash Cleanup
Project PaWiKAN
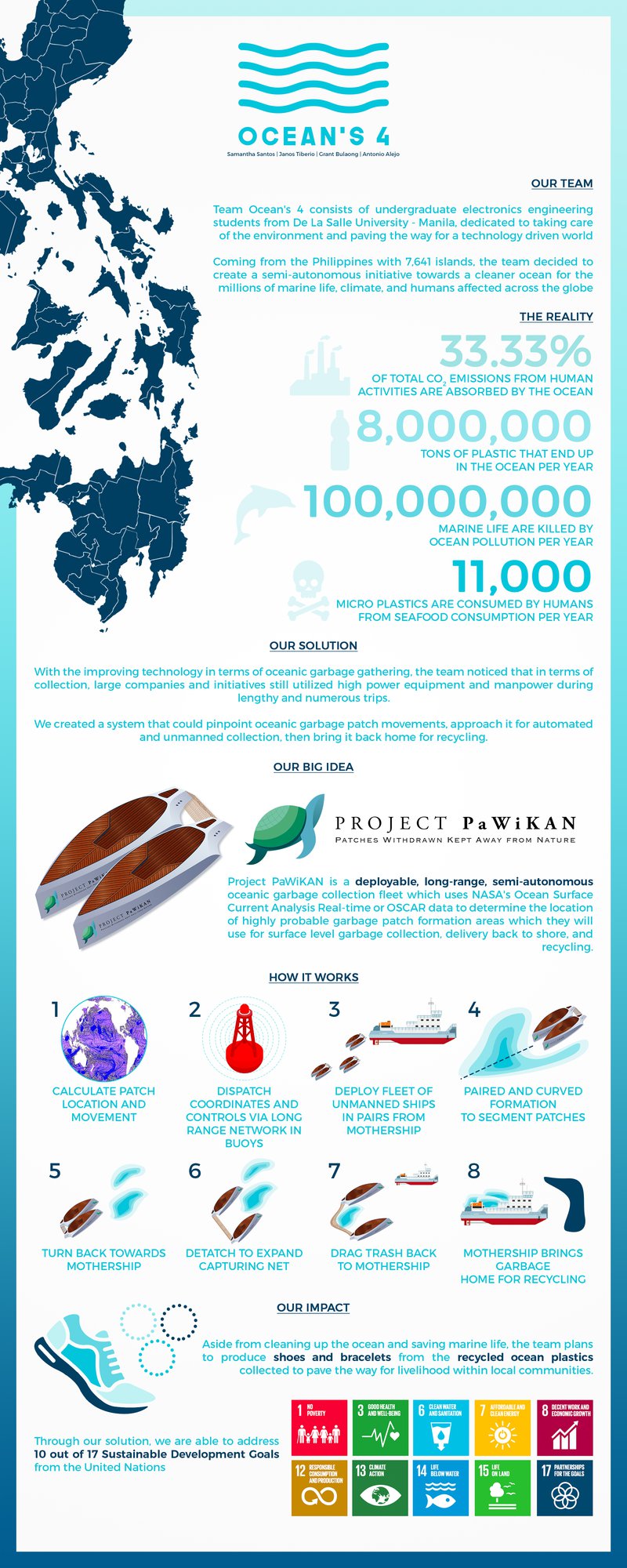
Project PaWiKAN is a deployable, long-range, semi-autonomous oceanic garbage collection fleet system which utilizes NASA's OSCAR data to determine the location of highly probable areas of garbage patch formations.
Background
It has been estimated that up to 90 percent of the world's marine pollution are floating, synthetic materials (Ballerini, et al. 2018). Also, 8 million tons of plastic waste reaches the ocean each year, and with no action that volume is projected to double by 2030, and double again by 2050. The large amount of oceanic pollution affects not only marine life but also its consumers and overall climate. Day after day, significant efforts are made so that this number would not rise. But such efforts often require countless hours of labor and exposure to dangers at sea.
Who Are We?
We are Ocean's 4, a group of electronics engineering students from De La Salle University - Manila in the Philippines. We aim to clean up the ocean one trip at a time.
Locating Garbage Patches Using NASA's OSCAR
Ocean plastic can persist in sea surface waters, eventually accumulating in remote areas of the world’s oceans (Lebreton, et al., 2018). There are five major gyres around the world which trap floating waste and form the world's five major garbage patches. Smaller gyres are also measurable within and outside these major gyres.
Figure 1. The Five Major Ocean Gyres
NASA's Ocean Surface Current Analyses Real-time (OSCAR) database provides information on global surface currents from satellite-sensed sea surface height gradients, ocean vector winds, and sea surface temperature fields using geostrophy, Ekman, and thermal wind dynamics. We used this database to look for gyres of all possible scales as well as safe paths for ocean travel.
Project PaWiKAN determines possible specific locations of smaller, local gyres (potential garbage patches) by using live data taken from the OSCAR - PODAAC drive. Ocean vector currents are mapped along the earth's surface with a resolution of 20 x 20 square kilometers.
The vector data was then used to compute local curl to indicate areas with a high probability for inward flow. Aside from this vector streamlines were placed in a discrete grid to generalize trash flow as seen in Figure 2. Lastly, using the streamline data, particles were placed and animated to visualize the trash particles behavior in the vector field as seen in Figure 3. The analysis of this data was performed on the Matrix Laboratory (MATLAB), where GPS coordinates are obtained.
Figure 2. Generated Streamline Plot
Figure 3. Generated Particle Behavior
Our Solution
Project PaWiKAN (Pawikan, Tagalog word for Sea Turtle) is a deployable, semi-autonomous, oceanic garbage collection fleet system capable of GPS tagging of high-probability garbage patch locations through the analysis of live NASA data from its Ocean Surface Current Analysis Real Time or OSCAR. It uses a pair of dynamically reconfigurable boats which are capable of automatically or manually trapping and returning ocean waste after deployment from mother ships. We look to create a fleet of such boats to target as much ocean pollution as possible.
The project is equipped with an long-range communication system based on LoRa technology and a microcontroller for the communication of sensor and control information to and from the deployment station.
- Based on the range of LoRa, the transmission range from the deployment station is approximately 10 kilometers. Strategically-placed, solar-powered moored buoys across the ocean are used to form a mesh network that can relay communication information and allow for inter-mission communication and coordination
Figure 4. Deployment Example
Collection Method
- Observe and segment possible large oceanic garbage patches
- Expand net using a tension feedback controller for collection
- Drag back segmented patch of garbage to mother ship for segregation and eventual recycling
Figure 5. Example Collection Method
To expand and retract the net, cylindrical rollers on both boats would rotate the net to the desired length and tautness. Tension sensors next to the cylindrical rollers on either boat will provide a feedback loop to the microcontroller.
Figure 6. Tension sensor diagram
Why two boats?
The use of two boats allow for more adaptive, swarm-like movements when collecting floating ocean trash. This is advantageous over single-unit collection systems especially when the size and shape of the expected trash pieces are unknown. Initially, the boats would approach the expected garbage heap as a single unit before an AI would decide the capture process. Shown in the video below are possible configurations for garbage trapping.
Safety Measures
We addressed the possible risk of accidentally capturing marine life by installing sensors on the boat pairs. Such sensors include:
- Temperature / IR sensors
- Motion sensors
- On-board cameras
Based on the above sensor data, the system would adjust the net tension so that the trapped marine animal may escape.
We also address the possible risk of damage to the boat by using OSCAR data to automatically determine and decide to avoid locations where garbage collection may be difficult, such as severe tropical cyclones.
The determined garbage patch locations may not always be accurate. To avoid wastage of resources, a recon drone may be used to profile the suspected area for garbage.
A Scale Model
We created a scale model using the bases of Remote-Controlled (RC) Cars, Arduino microcontrollers, and Long Range (LoRa) modules. The control senders (mother ships), relays (buoys), and receivers (RC cars / boats) all use the communication circuit that uses a LoRa module as well as a Bluetooth module to allow for serial input coming from a smartphone.
The schematic diagram for this circuit can be found here. For this circuit, we created a compatible shield for the Arduino Uno R3. Here, the remaining pins are used for motor control in the RC cars.
Figure 7. PCB Design
Running Prototype
We simulated the collection method using our scale model with the working codes, network, and system as seen in Figure 8.
Figure 8. Running Prototype
Initial 3D Prototype
We created initial 3D prototypes ready for printing. You may view them here.
Softwares Utilized
- Matrix Laboratory (MATLAB)
- We used MATLAB to analyze the raw data provided by NASA's OSCAR and translate it to a worldwide vector field of ocean surface current velocities. The localized vorticity was then taken to produce a heat-map of areas with high overall circular movement. Afterwards, a streamline plot was generated to observe particle movement about the vector field to isolate areas where particles would converge. From the graph produced, those areas were then marked as highly probable places to have garbage patch formations. To supplement that, an animated version was produced using a stream-particle function to produce a graph where garbage patch locations could be seen.
- Arduino Integrated Development Environment (IDE)
- We used the Arduino IDE to compile and upload our code. To check the communications of the device, we also used the built-in serial monitor.
- Adobe Photoshop
- Adobe Photoshop was utilized to create the first overall look of the ship.
- SolidWorks
- SolidWorks was utilized to create the initial print-ready 3D model of the ships.
- Adobe After Effects
- Adobe After Effects was utilized to create the animations and presentations in the project page.
Codes
- View our MATLAB code for mapping the highly probable oceanic garbage patch formations here.
- View our Arduino code to control the boats accompanied by the LoRa modules here.
Significance and Impact
As a means of targeting the greatest number of Sustainable Development Goals (SDGs) posed by the United Nations, we look to reach out to local shoreline communities by providing opportunities for the segregation, recycling, and use of the obtained ocean waste. We also look to research, develop, and manufacture relevant recycled plastic products in partnership with the local communities as a means of spreading environmental awareness as well as our own initiatives.
Here's a summary of the SDGs we target and how we intend to address them:
- Clean Water and Sanitation
- The project rids the ocean of waste.
- Decent Work and Economic Growth
- Our social enterprise project provides opportunities for local communities near shorelines to segregate, recycle, and use the obtained ocean waste.
- Responsible Consumption and Production
- We promote the responsible consumption and production of plastic products through our awareness campaigns.
- Climate Action
- The project helps reduce carbon emissions through its collection and recycling efforts.
- Life Below Water
- The reduction of waste in the ocean provides a safer life for sea creatures. Also, the project is designed so as not to disturb marine life.
- Life On Land
- Healthier ocean life means healthier life on land.
- Partnerships for the Goals
- We look to work with other organizations to help make our goal of cleaning the oceans a reality
Future Plans
- Funding
- We aim to continue developing the system and look for possible organizations or investors to help us make this idea come to life. Given that developments have already been made towards automating the gathering of oceanic garbage patches as seen in Boyan Slat's Ocean Cleanup project, we aim to look towards partners that may allow us to work in conjunction with one another in terms of automating their collection system as well. We want this initiative to be operational all over the globe by 2021 if not earlier.
- Social Enterprise
- Moreover, with the system in place, we are focused on also providing livelihood opportunities from nearby shoreline communities closest to our mothership's docking location. With the collected oceanic garbage, particularly plastic, the local communities may earn income from the segregation and consequent recycling of the collected materials into shoes and accessories (bracelets).
- Sustainability
- For the initial design, the team decided to utilize battery operated ships for their collection system. Since numerous fleets would be sent out at once, simultaneous large collections could be made to reduce the number of trips. Later on, they aim to develop their ships to become solar or hydro-electric powered.
Given that the idea created is for such a large, industrial, and global stage, the researchers need NASA's support to begin the work on the initiative the world and its future generations desperately need.
Review of Related Literature
- Oceanic Garbage
- In 31 Years, it was predicted that the weight of plastics in the ocean would equal the weight of fish. While the worldwide use of plastic was reported to double in the next 50 years. An estimate figure for the amount of floating plastic found in the oceans were 5.25 trillion pieces, these plastics break down into “microplastics” that mix with the floating plankton which has an essential part of the food web (Lindstorm, 2019).
- Garbage Patches
- Abundant marine litters collect in gyres found in mid-ocean subtropical areas in the ocean. These formations were titled as ‘garbage patches’ due to the tendencies for litter to float towards these areas. An example garbage patch could be seen at the South Atlantic area, in addition it was stated that 60-80% of land-based litter found in the garbage patch was from south America, with the remaining percentage from Africa. Also, the paper stated the percentage of trash at specific levels in the area. That shows that the trend that trash flows from different areas of the world towards garbage patches were noticed to be a common phenomenon (Ryan, 2013).
- The Ocean Cleanup by Boyan Slat
- The buildup of plastic in the ocean has become a crucial matter because of the drastic effects it could do the both ocean ecosystems and environmental managers. Because of the nature of this problem, different solutions come into light. one project done to clean the ocean in a large-scale introduce a method to remove plastic debris, this project was called the ocean cleanup. The project was said to remove 17% of plastic in the north pacific ‘garbage patch’ by 2025, in contrast an estimate to the volume of plastic present was estimated to be 51 trillion particles floating on the ocean (Rochman, 2016).
- Other Ocean Cleanup Efforts
- In 2014 the amount of plastic produced reached 311 million tons and was estimated to double in the next 20 years. Because of the characteristics of plastics being cheap and durable an increasing amount of plastic litters could be found in both ocean and land has increased. Attempts on ocean cleanup varies because of the unique methods done to help the cause. With projects to help the ocean being either passive or active cleaning, more and more projects are done to aid the cleanup of the ocean. Some examples of efforts done to clean the ocean include prevention and regulation of plastic dumps and collection of plastics with the use of technology (Magnier, Mugge, & Schoormans, 2019).
- In 2014 the amount of plastic produced reached 311 million tons and was estimated to double in the next 20 years. Because of the characteristics of plastics being cheap and durable an increasing amount of plastic litters could be found in both ocean and land has increased. Attempts on ocean cleanup varies because of the unique methods done to help the cause. With projects to help the ocean being either passive or active cleaning, more and more projects are done to aid the cleanup of the ocean. Some examples of efforts done to clean the ocean include prevention and regulation of plastic dumps and collection of plastics with the use of technology (Magnier, Mugge, & Schoormans, 2019).
Reference Research Papers:
NASA Data Utilized:
ESR. 2009. OSCAR third degree resolution ocean surface currents. Ver. 1. PO.DAAC, CA, USA.
MATLAB References:
Statistical Data References:
https://www.worldwildlife.org/stories/how-climate-change-relates-to-oceans#
https://www.sciencedaily.com/releases/2017/07/170719140939.htm
http://www.beachapedia.org/Plastic_Pollution_Facts_and_Figures
https://www.sas.org.uk/our-work/plastic-pollution/plastic-pollution-facts-figures/
Related Literature References:
https://earthobservatory.nasa.gov/blogs/fromthefield/2016/09/14/one-word/
Magnier, L., Mugge, R., & Schoormans, J. (2019). Turning ocean garbage into products–Consumers’ evaluations of products made of recycled ocean plastic. Journal of cleaner production, 215, 84-98.
#ocean #oceancleanup #NASA #ESR #OSCAR #swarmintelligence #matlab #lora #arduino #spaceapps #spaceappsph #oceans4 #oceansfour #projectpawikan #pawikan