
Oceanus| Trash Cleanup
Project Details
The Challenge | Trash Cleanup
Oceanus
Saving Our Treasure : Solution to the Ocean Trash Cleanup
background
There are 5.25 trillion pieces of plasticdebris in the ocean. 269,000 tons of them float on the surface, whilefour billion plastic microfibers per square kilometer accumulate in the deep sea.(National Geographic) Ocean garbage not only destroys the ocean ecosystem, but alsocauses several conflicts between nations because garbage sometimes cross the borderalong the wind and currents. Furthermore, micro-plastics are also one of the major problems related to the ocean garbage problem. These are accumulated in our body when using toothpaste, cosmetics, bottled water,salt, etc. These micro-plastics are even more harmful when it floats with other pollutants such as heavy metals in seawater, DDT(pesticide) and toxic additives. Also, long-term exposure to micro-plastic causes fatal disorders in human organs suchas the heart, kidney and liver.
Oceanic garbage patches & Marine debris
Garbage patches are large areas of the ocean where litter, fishing gear, and other debris that are known as marine debris collects. They are formed by rotating ocean currents called "gyres." The gyres pull debris into one location, often the gyre's center, forming "garbage patches". There are five gyres in the ocean. One in the Indian Ocean, two in the Atlantic Ocean, and two in the Pacific Ocean. Garbage patches of varying sizes are located in each gyre. The most famous of these patches is often called the “Great Pacific Garbage Patch.” It is located in the North Pacific Gyre (between Hawaii and California). “Patch” is a misleading nickname, causing many to believe that these are islands of trash. Instead, the debris is spread across the surface of the water and from the surface all the way to the ocean floor. The debris ranges in size, from large abandoned fishing nets to tiny micro-plastics, which are plastic pieces smaller than 5mm in size. This makes it possible to sail through some areas of the Great Pacific Garbage Patch and see very little to no debris.
The Great Pacific Garbage Patch
The Great Pacific Garbage Patch is in the Pacific Ocean between Hawaii and California. It is the most well known patch. While some areas of the patch have more trash than others, much of the debris is made of micro-plastics. Because micro-plastics are smaller than a pencil eraser, they are not immediately noticeable to the naked eye. It’s more like pepper flakes swirling in a soup than something you can skim off the surface. You may come across larger items, like plastic bottles and nets, but it’s possible to sail through some areas of a garbage patch and not see any debris at all. Garbage patches are huge! It’s difficult to determine an exact size as the trash is constantly moving with ocean currents and winds.
purpose
OCEANUS is a project targeted on getting rid of trash in Earth's oceans. As suggested above, Earth's oceans are suffering from vast amounts of trash and the global environment is being threatened. Our project aims to reduce the amount of oceanic trash, especially plastic trash that are littered throughout the whole marine environment. We focused on two steps on planning project; the first figuring out which areas have great quantities of garbage, the second developing methods to collect accumulated garbage.
Main features
Preventing Excessive Load of Garbage
Through OSCAR 1 degree ocean surface currents data and Cross-Calibrated Multi-Platform(CCMP) ocean surface wind data, we found out points in the ocean where garbage accumulate a lot. Two methods were used to check points of accumulation.
First of all, we calculated the divergence of the vector data to figure out the flux density of ocean currents and ocean winds at each point. Points which showed a low divergence value mentioned that the point has a high density of water and wind flow, so it has a high percentage of garbage to accumulate, and vice versa.
Also, we used another algorithm to figure out which places garbage accumulate a lot. We spliced the ocean current data to multiple chunks, and calculated relationships between each chunks, and made a network describing the relationship. Using in-degree centrality and out-degree centrality, the algorithm calculated which point is the source — where current diverges, and where is the sink — where current converges. Then, using max-flow min-cut theorem, we calculated maximum flow between sources and sinks, yielding points which block the flow between sources and sinks.
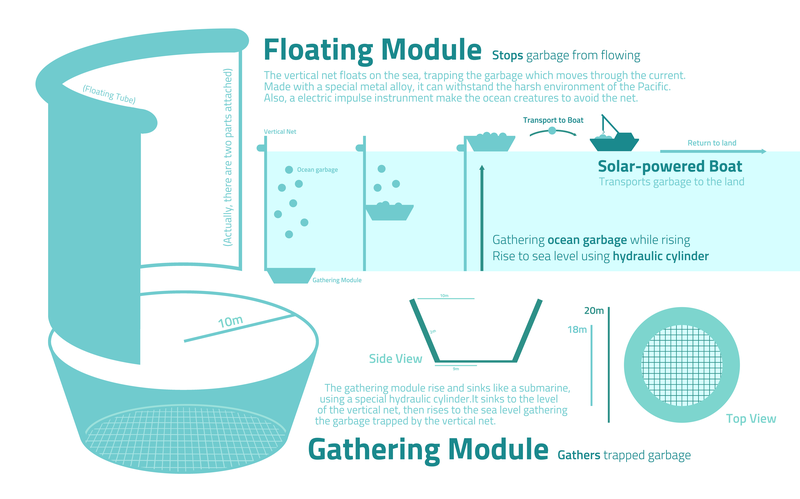
Collecting the Accumulated Garbage
Once the data is analyzed and the specific area is obtained, the ocean wastes will be caught by the mesh, which we call the floating module. Fishes would never be caught by it, because electric pulse would be always generated by the energy from solar-energy generator. When the trashes are trapped by the floating module (appropriate load : 400 ton), the elevating lift, we call it the gathering module, operates (by the solar energy), the gathering machine rises and sweep the garbage from the floating machine while ascending. After that, a solar powered boat comes and takes the garbage from the gathering machine, then returns to the land. The wastes could be mostly recycled, and some could be reproduced for new system (floating module, gathering module, etc.)
Predicting Pathways of Oceanus
Since we have the data of velocity of ocean currents, we can get the location of a certain particle on the current, by integrating the velocity of the route. To get the route, with discrete sensor data, we first find the closest datum at a certain point. If datum found, add the velocity multiplied with constant, changeable since we just care about the route, not the actual position. This process ends when the particle arrives at the continent or the speed of the flow is too slow.
For air currents, we applied the same mechanism. After finding the particle's route according to air currents and ocean currents, we add up those two and find what route would particles follow considering the air currents and ocean currents. We assumed that the particle moves completely the same direction and speed with the velocity vector. As a result, this algorithm finds the destination of the solar-powered boat with a certain start point P by adding up the velocity.
Calculating u, v of the velocity vector with an opposite sign would give the inverse solution of the route, meaning that with given destination Q, we can simply find where should we launch our solar-powered boat to reach the destination.
As solar-powered boat would follow ocean currents when launched, and follow both when returning, we can use destination Q and use inverse operation with data of ocean currents and use that destination Q as the start point with data of all currents to guess where the solar-powered boat arrives.
Protecting Marine life being caught by mesh
One of the potential risks of laying the skirt of nets and collect floating garbage is that lots of fish could be caught. Because we are arranging the system in the region where lots of marine life live in, we had to be contemplated in displacing our system without harming those natural life. As a solution, we have come up with the fish repelling device via electric pulse. First developed by Smith-Root, a fish repelling system called Fish Guidance and Deterrence Barriers contains BP-1.5 Programmable Output Waveform pulsars. The pulsars are connected to a group of electrodes submerged in the waterway. Pulsars store energy inside them and discharges it. Since pulse width and repetition are adjustable to create the waveform required to halt the movement of fish, it makes fish to avoid the waterway without harming the fish. Based on this model, we attach the pulsars at the top of the aluminum mesh so that the mesh can widely spreads out the pulse to nearby area, leading fish to avoid the mesh. Considering the wide size of mesh, various pulsars are needed. However, since aluminum has high conductivity, efficiency would be high enough. Sufficient amount of energy can be provided from solar panel which is placed upon the floating module.
Floating Module
The Ocean Cleanup Project has measured the vertical distribution of plastic oceanic garbage during their 6 expeditions from 2013 to 2015. According to their results, buoyant plastic garbages such as PET bottle are distributed within the top 5 meters of the ocean. We referred to this data, and set the depth of our aluminium mesh and the location of gathering module to be 5 meters below the surface. Floating module and the aluminium mesh attached to it has a wire for the gathering model to arise. It uses electricity created from solar panels on the top of the floating module to operate.
Gathering Module
We set the top radius into 10m, and the bottom radius into 9m. This is because the gathering module needs to gather as many wastes as possible, and also it has to maintain its center of mass so that the whole system doesn’t just cave over. By using the density of the material of gathering module(UHMW-PE), we calculated the total mass of it. It is about 106 ton. Once we calculated the total mass, we approximatelly calculated the appropriate load by simulating the whole system using the program “Maya 3D”. We set the standard for the maximum weight that can maintain the whole system(not just flip over).
Threshold force to set the system stationary
We chose one point from various coordinates where ocean current is accumulated a lot, which has a longitude of 155 and latitude of 10 to apply drag equation to calculate the threshold force to set the floating module stationary. For the gathering module which is set below water, we have modeled the magnitude of drag force and the magnitude of countering force against drag force. According to our modeling, total countering force in need is 0.346(N). Because it is small enough to neglect compared to its total weight of 106t, gathering module does not need power module to be pushed forward. For the floating module we have modeled the condition with the method applied in the case of gathering module. Because the floating module has 223t of total weight, it is accelerated by a rate of 1.097 (m/s^2). This amount of electric power is provided by solar panels on the floating module. Since total amount of energy produced from the solar panel exceeds the threshold for the floating module to stay stationary, the whole device can maintain mechanical equilibrium, without either being swept away by ocean current/wind or being capsized.Materials used in modules : UHMW-PE
UHMW-PE is an engineered-synthetic plastic used for space shuttles. Unlike the general plastic material, UHMW-PE has stronger durability, but also great lightness. Our plan is to use UHMW-PE for the material of the transporting machine, and the gathering module. It may seem ironic, but actually, it is a result of recycling. We are going to reproduce this material by gathering plastic wastes.
After we gather the plastic wastes from the machine, we can reproduce UHMW-PE by combining 10% polyethylene(which is basically the plastic wastes) with 90% decaline. This process contributes greatly to the quick increase of the system. Moreover, it is sustainable based on recycling process with the efficient collecting machine..
WEB PAGE
https://teamoceanus.github.io/oceanus/
bibliography
- ESR. 2007. OSCAR 1 degree ocean surface currents. Ver. 1. PO.DAAC, CA, USA. Dataset accessed [2019-10-19] at https://doi.org/10.5067/OSCAR-10D01.
- https://theoceancleanup.com/great-pacific-garbage-...
- http://sterlingplasticsinc.com/materials/uhmw-ultr...
Software / Artificial Languages used
- Visual Studio Code (Text Editor)
- Jupyter Notebook (Text Editor)
- Python 3
- Adobe Illustrator / Photoshop / After Effects
- HTML / CSS / JavaScript
- Maya 3D 2019