Team Updates
Data Transmission from VTX to Googles:
Video transmitters work using similar technology to a radio, the camera will be connected to the Video Transmitter. camera does the work of turning the images it is capturing into data, which is then sent into the video transmitter. The video transmitter turns that information into a radio signal, outputs it to the attached antenna, which then sends that signal out. The video receiver (VRx), attached to the goggles then captures that signal, coverts it back from radio waves into data, which is then shown on the display.
Factor Affecting the Data Transmission:
the power level of the VTx (rated in terms of milliwatts or mW), the antenna attached to VTx. The Power level of VTx affects the quality of the data over the distance from the transmitter and receiver device. the higher the rating power, the further distance quadcopter can go from base of operation and still maintain quality signal. But also, the higher the power output, the more heat that will be generated by the VTx, as well as more power consumed from your battery. So, we will be using a power output as 200-250 milliwatt which is suitable range so data won’t get confused with other signal and still be good range for quality signal.


| #include <Wire.h> //Include the Wire.h library so we can communicate with the gyro | |
| #include <EEPROM.h> //Include the EEPROM.h library so we can store information onto the EEPROM | |
| //Declaring Global Variables | |
| byte last_channel_1, last_channel_2, last_channel_3, last_channel_4; | |
| byte lowByte, highByte, type, gyro_address, error, clockspeed_ok; | |
| byte channel_1_assign, channel_2_assign, channel_3_assign, channel_4_assign; | |
| byte roll_axis, pitch_axis, yaw_axis; | |
| byte receiver_check_byte, gyro_check_byte; | |
| volatile int receiver_input_channel_1, receiver_input_channel_2, receiver_input_channel_3, receiver_input_channel_4; | |
| int center_channel_1, center_channel_2, center_channel_3, center_channel_4; | |
| int high_channel_1, high_channel_2, high_channel_3, high_channel_4; | |
| int low_channel_1, low_channel_2, low_channel_3, low_channel_4; | |
| int address, cal_int; | |
| unsigned long timer, timer_1, timer_2, timer_3, timer_4, current_time; | |
| float gyro_pitch, gyro_roll, gyro_yaw; | |
| float gyro_roll_cal, gyro_pitch_cal, gyro_yaw_cal; | |
| //Setup routine | |
| void setup(){ | |
| pinMode(12, OUTPUT); | |
| //Arduino (Atmega) pins default to inputs, so they don't need to be explicitly declared as inputs | |
| PCICR |= (1 << PCIE0); // set PCIE0 to enable PCMSK0 scan | |
| PCMSK0 |= (1 << PCINT0); // set PCINT0 (digital input 8) to trigger an interrupt on state change | |
| PCMSK0 |= (1 << PCINT1); // set PCINT1 (digital input 9)to trigger an interrupt on state change | |
| PCMSK0 |= (1 << PCINT2); // set PCINT2 (digital input 10)to trigger an interrupt on state change | |
| PCMSK0 |= (1 << PCINT3); // set PCINT3 (digital input 11)to trigger an interrupt on state change | |
| Wire.begin(); //Start the I2C as master | |
| Serial.begin(57600); //Start the serial connetion @ 57600bps | |
| delay(250); //Give the gyro time to start | |
| } | |
| //Main program | |
| void loop(){ | |
| //Show the YMFC-3D V2 intro | |
| intro(); | |
| Serial.println(F("")); | |
| Serial.println(F("===================================================")); | |
| Serial.println(F("System check")); | |
| Serial.println(F("===================================================")); | |
| delay(1000); | |
| Serial.println(F("Checking I2C clock speed.")); | |
| delay(1000); | |
| TWBR = 12; //Set the I2C clock speed to 400kHz. | |
| #if F_CPU == 16000000L //If the clock speed is 16MHz include the next code line when compiling | |
| clockspeed_ok = 1; //Set clockspeed_ok to 1 | |
| #endif //End of if statement | |
| if(TWBR == 12 && clockspeed_ok){ | |
| Serial.println(F("I2C clock speed is correctly set to 400kHz.")); | |
| } | |
| else{ | |
| Serial.println(F("I2C clock speed is not set to 400kHz. (ERROR 8)")); | |
| error = 1; | |
| } | |
| if(error == 0){ | |
| Serial.println(F("")); | |
| Serial.println(F("===================================================")); | |
| Serial.println(F("Transmitter setup")); | |
| Serial.println(F("===================================================")); | |
| delay(1000); | |
| Serial.print(F("Checking for valid receiver signals.")); | |
| //Wait 10 seconds until all receiver inputs are valid | |
| wait_for_receiver(); | |
| Serial.println(F("")); | |
| } | |
| //Quit the program in case of an error | |
| if(error == 0){ | |
| delay(2000); | |
| Serial.println(F("Place all sticks and subtrims in the center position within 10 seconds.")); | |
| for(int i = 9;i > 0;i--){ | |
| delay(1000); | |
| Serial.print(i); | |
| Serial.print(" "); | |
| } | |
| Serial.println(" "); | |
| //Store the central stick positions | |
| center_channel_1 = receiver_input_channel_1; | |
| center_channel_2 = receiver_input_channel_2; | |
| center_channel_3 = receiver_input_channel_3; | |
| center_channel_4 = receiver_input_channel_4; | |
| Serial.println(F("")); | |
| Serial.println(F("Center positions stored.")); | |
| Serial.print(F("Digital input 08 = ")); | |
| Serial.println(receiver_input_channel_1); | |
| Serial.print(F("Digital input 09 = ")); | |
| Serial.println(receiver_input_channel_2); | |
| Serial.print(F("Digital input 10 = ")); | |
| Serial.println(receiver_input_channel_3); | |
| Serial.print(F("Digital input 11 = ")); | |
| Serial.println(receiver_input_channel_4); | |
| Serial.println(F("")); | |
| Serial.println(F("")); | |
| } | |
| if(error == 0){ | |
| Serial.println(F("Move the throttle stick to full throttle and back to center")); | |
| //Check for throttle movement | |
| check_receiver_inputs(1); | |
| Serial.print(F("Throttle is connected to digital input ")); | |
| Serial.println((channel_3_assign & 0b00000111) + 7); | |
| if(channel_3_assign & 0b10000000)Serial.println(F("Channel inverted = yes")); | |
| else Serial.println(F("Channel inverted = no")); | |
| wait_sticks_zero(); | |
| Serial.println(F("")); | |
| Serial.println(F("")); | |
| Serial.println(F("Move the roll stick to simulate left wing up and back to center")); | |
| //Check for throttle movement | |
| check_receiver_inputs(2); | |
| Serial.print(F("Roll is connected to digital input ")); | |
| Serial.println((channel_1_assign & 0b00000111) + 7); | |
| if(channel_1_assign & 0b10000000)Serial.println(F("Channel inverted = yes")); | |
| else Serial.println(F("Channel inverted = no")); | |
| wait_sticks_zero(); | |
| } | |
| if(error == 0){ | |
| Serial.println(F("")); | |
| Serial.println(F("")); | |
| Serial.println(F("Move the pitch stick to simulate nose up and back to center")); | |
| //Check for throttle movement | |
| check_receiver_inputs(3); | |
| Serial.print(F("Pitch is connected to digital input ")); | |
| Serial.println((channel_2_assign & 0b00000111) + 7); | |
| if(channel_2_assign & 0b10000000)Serial.println(F("Channel inverted = yes")); | |
| else Serial.println(F("Channel inverted = no")); | |
| wait_sticks_zero(); | |
| } | |
| if(error == 0){ | |
| Serial.println(F("")); | |
| Serial.println(F("")); | |
| Serial.println(F("Move the yaw stick to simulate nose right and back to center")); | |
| //Check for throttle movement | |
| check_receiver_inputs(4); | |
| Serial.print(F("Yaw is connected to digital input ")); | |
| Serial.println((channel_4_assign & 0b00000111) + 7); | |
| if(channel_4_assign & 0b10000000)Serial.println(F("Channel inverted = yes")); | |
| else Serial.println(F("Channel inverted = no")); | |
| wait_sticks_zero(); | |
| } | |
| if(error == 0){ | |
| Serial.println(F("")); | |
| Serial.println(F("")); | |
| Serial.println(F("Gently move all the sticks simultaneously to their extends")); | |
| Serial.println(F("When ready put the sticks back in their center positions")); | |
| //Register the min and max values of the receiver channels | |
| register_min_max(); | |
| Serial.println(F("")); | |
| Serial.println(F("")); | |
| Serial.println(F("High, low and center values found during setup")); | |
| Serial.print(F("Digital input 08 values:")); | |
| Serial.print(low_channel_1); | |
| Serial.print(F(" - ")); | |
| Serial.print(center_channel_1); | |
| Serial.print(F(" - ")); | |
| Serial.println(high_channel_1); | |
| Serial.print(F("Digital input 09 values:")); | |
| Serial.print(low_channel_2); | |
| Serial.print(F(" - ")); | |
| Serial.print(center_channel_2); | |
| Serial.print(F(" - ")); | |
| Serial.println(high_channel_2); | |
| Serial.print(F("Digital input 10 values:")); | |
| Serial.print(low_channel_3); | |
| Serial.print(F(" - ")); | |
| Serial.print(center_channel_3); | |
| Serial.print(F(" - ")); | |
| Serial.println(high_channel_3); | |
| Serial.print(F("Digital input 11 values:")); | |
| Serial.print(low_channel_4); | |
| Serial.print(F(" - ")); | |
| Serial.print(center_channel_4); | |
| Serial.print(F(" - ")); | |
| Serial.println(high_channel_4); | |
| Serial.println(F("Move stick 'nose up' and back to center to continue")); | |
| check_to_continue(); | |
| } | |
| if(error == 0){ | |
| //What gyro is connected | |
| Serial.println(F("")); | |
| Serial.println(F("===================================================")); | |
| Serial.println(F("Gyro search")); | |
| Serial.println(F("===================================================")); | |
| delay(2000); | |
| Serial.println(F("Searching for MPU-6050 on address 0x68/104")); | |
| delay(1000); | |
| if(search_gyro(0x68, 0x75) == 0x68){ | |
| Serial.println(F("MPU-6050 found on address 0x68")); | |
| type = 1; | |
| gyro_address = 0x68; | |
| } | |
| if(type == 0){ | |
| Serial.println(F("Searching for MPU-6050 on address 0x69/105")); | |
| delay(1000); | |
| if(search_gyro(0x69, 0x75) == 0x68){ | |
| Serial.println(F("MPU-6050 found on address 0x69")); | |
| type = 1; | |
| gyro_address = 0x69; | |
| } | |
| } | |
| if(type == 0){ | |
| Serial.println(F("Searching for L3G4200D on address 0x68/104")); | |
| delay(1000); | |
| if(search_gyro(0x68, 0x0F) == 0xD3){ | |
| Serial.println(F("L3G4200D found on address 0x68")); | |
| type = 2; | |
| gyro_address = 0x68; | |
| } | |
| } | |
| if(type == 0){ | |
| Serial.println(F("Searching for L3G4200D on address 0x69/105")); | |
| delay(1000); | |
| if(search_gyro(0x69, 0x0F) == 0xD3){ | |
| Serial.println(F("L3G4200D found on address 0x69")); | |
| type = 2; | |
| gyro_address = 0x69; | |
| } | |
| } | |
| if(type == 0){ | |
| Serial.println(F("Searching for L3GD20H on address 0x6A/106")); | |
| delay(1000); | |
| if(search_gyro(0x6A, 0x0F) == 0xD7){ | |
| Serial.println(F("L3GD20H found on address 0x6A")); | |
| type = 3; | |
| gyro_address = 0x6A; | |
| } | |
| } | |
| if(type == 0){ | |
| Serial.println(F("Searching for L3GD20H on address 0x6B/107")); | |
| delay(1000); | |
| if(search_gyro(0x6B, 0x0F) == 0xD7){ | |
| Serial.println(F("L3GD20H found on address 0x6B")); | |
| type = 3; | |
| gyro_address = 0x6B; | |
| } | |
| } | |
| if(type == 0){ | |
| Serial.println(F("No gyro device found!!! (ERROR 3)")); | |
| error = 1; | |
| } | |
| else{ | |
| delay(3000); | |
| Serial.println(F("")); | |
| Serial.println(F("===================================================")); | |
| Serial.println(F("Gyro register settings")); | |
| Serial.println(F("===================================================")); | |
| start_gyro(); //Setup the gyro for further use | |
| } | |
| } | |
| //If the gyro is found we can setup the correct gyro axes. | |
| if(error == 0){ | |
| delay(3000); | |
| Serial.println(F("")); | |
| Serial.println(F("===================================================")); | |
| Serial.println(F("Gyro calibration")); | |
| Serial.println(F("===================================================")); | |
| Serial.println(F("Don't move the quadcopter!! Calibration starts in 3 seconds")); | |
| delay(3000); | |
| Serial.println(F("Calibrating the gyro, this will take +/- 8 seconds")); | |
| Serial.print(F("Please wait")); | |
| //Let's take multiple gyro data samples so we can determine the average gyro offset (calibration). | |
| for (cal_int = 0; cal_int < 2000 ; cal_int ++){ //Take 2000 readings for calibration. | |
| if(cal_int % 100 == 0)Serial.print(F(".")); //Print dot to indicate calibration. | |
| gyro_signalen(); //Read the gyro output. | |
| gyro_roll_cal += gyro_roll; //Ad roll value to gyro_roll_cal. | |
| gyro_pitch_cal += gyro_pitch; //Ad pitch value to gyro_pitch_cal. | |
| gyro_yaw_cal += gyro_yaw; //Ad yaw value to gyro_yaw_cal. | |
| delay(4); //Wait 3 milliseconds before the next loop. | |
| } | |
| //Now that we have 2000 measures, we need to devide by 2000 to get the average gyro offset. | |
| gyro_roll_cal /= 2000; //Divide the roll total by 2000. | |
| gyro_pitch_cal /= 2000; //Divide the pitch total by 2000. | |
| gyro_yaw_cal /= 2000; //Divide the yaw total by 2000. | |
| //Show the calibration results | |
| Serial.println(F("")); | |
| Serial.print(F("Axis 1 offset=")); | |
| Serial.println(gyro_roll_cal); | |
| Serial.print(F("Axis 2 offset=")); | |
| Serial.println(gyro_pitch_cal); | |
| Serial.print(F("Axis 3 offset=")); | |
| Serial.println(gyro_yaw_cal); | |
| Serial.println(F("")); | |
| Serial.println(F("===================================================")); | |
| Serial.println(F("Gyro axes configuration")); | |
| Serial.println(F("===================================================")); | |
| //Detect the left wing up movement | |
| Serial.println(F("Lift the left side of the quadcopter to a 45 degree angle within 10 seconds")); | |
| //Check axis movement | |
| check_gyro_axes(1); | |
| if(error == 0){ | |
| Serial.println(F("OK!")); | |
| Serial.print(F("Angle detection = ")); | |
| Serial.println(roll_axis & 0b00000011); | |
| if(roll_axis & 0b10000000)Serial.println(F("Axis inverted = yes")); | |
| else Serial.println(F("Axis inverted = no")); | |
| Serial.println(F("Put the quadcopter back in its original position")); | |
| Serial.println(F("Move stick 'nose up' and back to center to continue")); | |
| check_to_continue(); | |
| //Detect the nose up movement | |
| Serial.println(F("")); | |
| Serial.println(F("")); | |
| Serial.println(F("Lift the nose of the quadcopter to a 45 degree angle within 10 seconds")); | |
| //Check axis movement | |
| check_gyro_axes(2); | |
| } | |
| if(error == 0){ | |
| Serial.println(F("OK!")); | |
| Serial.print(F("Angle detection = ")); | |
| Serial.println(pitch_axis & 0b00000011); | |
| if(pitch_axis & 0b10000000)Serial.println(F("Axis inverted = yes")); | |
| else Serial.println(F("Axis inverted = no")); | |
| Serial.println(F("Put the quadcopter back in its original position")); | |
| Serial.println(F("Move stick 'nose up' and back to center to continue")); | |
| check_to_continue(); | |
| //Detect the nose right movement | |
| Serial.println(F("")); | |
| Serial.println(F("")); | |
| Serial.println(F("Rotate the nose of the quadcopter 45 degree to the right within 10 seconds")); | |
| //Check axis movement | |
| check_gyro_axes(3); | |
| } | |
| if(error == 0){ | |
| Serial.println(F("OK!")); | |
| Serial.print(F("Angle detection = ")); | |
| Serial.println(yaw_axis & 0b00000011); | |
| if(yaw_axis & 0b10000000)Serial.println(F("Axis inverted = yes")); | |
| else Serial.println(F("Axis inverted = no")); | |
| Serial.println(F("Put the quadcopter back in its original position")); | |
| Serial.println(F("Move stick 'nose up' and back to center to continue")); | |
| check_to_continue(); | |
| } | |
| } | |
| if(error == 0){ | |
| Serial.println(F("")); | |
| Serial.println(F("===================================================")); | |
| Serial.println(F("LED test")); | |
| Serial.println(F("===================================================")); | |
| digitalWrite(12, HIGH); | |
| Serial.println(F("The LED should now be lit")); | |
| Serial.println(F("Move stick 'nose up' and back to center to continue")); | |
| check_to_continue(); | |
| digitalWrite(12, LOW); | |
| } | |
| Serial.println(F("")); | |
| if(error == 0){ | |
| Serial.println(F("===================================================")); | |
| Serial.println(F("Final setup check")); | |
| Serial.println(F("===================================================")); | |
| delay(1000); | |
| if(receiver_check_byte == 0b00001111){ | |
| Serial.println(F("Receiver channels ok")); | |
| } | |
| else{ | |
| Serial.println(F("Receiver channel verification failed!!! (ERROR 6)")); | |
| error = 1; | |
| } | |
| delay(1000); | |
| if(gyro_check_byte == 0b00000111){ | |
| Serial.println(F("Gyro axes ok")); | |
| } | |
| else{ | |
| Serial.println(F("Gyro exes verification failed!!! (ERROR 7)")); | |
| error = 1; | |
| } | |
| } | |
| if(error == 0){ | |
| //If all is good, store the information in the EEPROM | |
| Serial.println(F("")); | |
| Serial.println(F("===================================================")); | |
| Serial.println(F("Storing EEPROM information")); | |
| Serial.println(F("===================================================")); | |
| Serial.println(F("Writing EEPROM")); | |
| delay(1000); | |
| Serial.println(F("Done!")); | |
| EEPROM.write(0, center_channel_1 & 0b11111111); | |
| EEPROM.write(1, center_channel_1 >> 8); | |
| EEPROM.write(2, center_channel_2 & 0b11111111); | |
| EEPROM.write(3, center_channel_2 >> 8); | |
| EEPROM.write(4, center_channel_3 & 0b11111111); | |
| EEPROM.write(5, center_channel_3 >> 8); | |
| EEPROM.write(6, center_channel_4 & 0b11111111); | |
| EEPROM.write(7, center_channel_4 >> 8); | |
| EEPROM.write(8, high_channel_1 & 0b11111111); | |
| EEPROM.write(9, high_channel_1 >> 8); | |
| EEPROM.write(10, high_channel_2 & 0b11111111); | |
| EEPROM.write(11, high_channel_2 >> 8); | |
| EEPROM.write(12, high_channel_3 & 0b11111111); | |
| EEPROM.write(13, high_channel_3 >> 8); | |
| EEPROM.write(14, high_channel_4 & 0b11111111); | |
| EEPROM.write(15, high_channel_4 >> 8); | |
| EEPROM.write(16, low_channel_1 & 0b11111111); | |
| EEPROM.write(17, low_channel_1 >> 8); | |
| EEPROM.write(18, low_channel_2 & 0b11111111); | |
| EEPROM.write(19, low_channel_2 >> 8); | |
| EEPROM.write(20, low_channel_3 & 0b11111111); | |
| EEPROM.write(21, low_channel_3 >> 8); | |
| EEPROM.write(22, low_channel_4 & 0b11111111); | |
| EEPROM.write(23, low_channel_4 >> 8); | |
| EEPROM.write(24, channel_1_assign); | |
| EEPROM.write(25, channel_2_assign); | |
| EEPROM.write(26, channel_3_assign); | |
| EEPROM.write(27, channel_4_assign); | |
| EEPROM.write(28, roll_axis); | |
| EEPROM.write(29, pitch_axis); | |
| EEPROM.write(30, yaw_axis); | |
| EEPROM.write(31, type); | |
| EEPROM.write(32, gyro_address); | |
| //Write the EEPROM signature | |
| EEPROM.write(33, 'J'); | |
| EEPROM.write(34, 'M'); | |
| EEPROM.write(35, 'B'); | |
| //To make sure evrything is ok, verify the EEPROM data. | |
| Serial.println(F("Verify EEPROM data")); | |
| delay(1000); | |
| if(center_channel_1 != ((EEPROM.read(1) << 8) | EEPROM.read(0)))error = 1; | |
| if(center_channel_2 != ((EEPROM.read(3) << 8) | EEPROM.read(2)))error = 1; | |
| if(center_channel_3 != ((EEPROM.read(5) << 8) | EEPROM.read(4)))error = 1; | |
| if(center_channel_4 != ((EEPROM.read(7) << 8) | EEPROM.read(6)))error = 1; | |
| if(high_channel_1 != ((EEPROM.read(9) << 8) | EEPROM.read(8)))error = 1; | |
| if(high_channel_2 != ((EEPROM.read(11) << 8) | EEPROM.read(10)))error = 1; | |
| if(high_channel_3 != ((EEPROM.read(13) << 8) | EEPROM.read(12)))error = 1; | |
| if(high_channel_4 != ((EEPROM.read(15) << 8) | EEPROM.read(14)))error = 1; | |
| if(low_channel_1 != ((EEPROM.read(17) << 8) | EEPROM.read(16)))error = 1; | |
| if(low_channel_2 != ((EEPROM.read(19) << 8) | EEPROM.read(18)))error = 1; | |
| if(low_channel_3 != ((EEPROM.read(21) << 8) | EEPROM.read(20)))error = 1; | |
| if(low_channel_4 != ((EEPROM.read(23) << 8) | EEPROM.read(22)))error = 1; | |
| if(channel_1_assign != EEPROM.read(24))error = 1; | |
| if(channel_2_assign != EEPROM.read(25))error = 1; | |
| if(channel_3_assign != EEPROM.read(26))error = 1; | |
| if(channel_4_assign != EEPROM.read(27))error = 1; | |
| if(roll_axis != EEPROM.read(28))error = 1; | |
| if(pitch_axis != EEPROM.read(29))error = 1; | |
| if(yaw_axis != EEPROM.read(30))error = 1; | |
| if(type != EEPROM.read(31))error = 1; | |
| if(gyro_address != EEPROM.read(32))error = 1; | |
| if('J' != EEPROM.read(33))error = 1; | |
| if('M' != EEPROM.read(34))error = 1; | |
| if('B' != EEPROM.read(35))error = 1; | |
| if(error == 1)Serial.println(F("EEPROM verification failed!!! (ERROR 5)")); | |
| else Serial.println(F("Verification done")); | |
| } | |
| if(error == 0){ | |
| Serial.println(F("Setup is finished.")); | |
| Serial.println(F("You can now calibrate the esc's and upload the YMFC-AL code.")); | |
| } | |
| else{ | |
| Serial.println(F("The setup is aborted due to an error.")); | |
| Serial.println(F("Check the Q and A page of the YMFC-AL project on:")); | |
| Serial.println(F("www.brokking.net for more information about this error.")); | |
| } | |
| while(1); | |
| } | |
| //Search for the gyro and check the Who_am_I register | |
| byte search_gyro(int gyro_address, int who_am_i){ | |
| Wire.beginTransmission(gyro_address); | |
| Wire.write(who_am_i); | |
| Wire.endTransmission(); | |
| Wire.requestFrom(gyro_address, 1); | |
| timer = millis() + 100; | |
| while(Wire.available() < 1 && timer > millis()); | |
| lowByte = Wire.read(); | |
| address = gyro_address; | |
| return lowByte; | |
| } | |
| void start_gyro(){ | |
| //Setup the L3G4200D or L3GD20H | |
| if(type == 2 || type == 3){ | |
| Wire.beginTransmission(address); //Start communication with the gyro with the address found during search | |
| Wire.write(0x20); //We want to write to register 1 (20 hex) | |
| Wire.write(0x0F); //Set the register bits as 00001111 (Turn on the gyro and enable all axis) | |
| Wire.endTransmission(); //End the transmission with the gyro | |
| Wire.beginTransmission(address); //Start communication with the gyro (adress 1101001) | |
| Wire.write(0x20); //Start reading @ register 28h and auto increment with every read | |
| Wire.endTransmission(); //End the transmission | |
| Wire.requestFrom(address, 1); //Request 6 bytes from the gyro | |
| while(Wire.available() < 1); //Wait until the 1 byte is received | |
| Serial.print(F("Register 0x20 is set to:")); | |
| Serial.println(Wire.read(),BIN); | |
| Wire.beginTransmission(address); //Start communication with the gyro with the address found during search | |
| Wire.write(0x23); //We want to write to register 4 (23 hex) | |
| Wire.write(0x90); //Set the register bits as 10010000 (Block Data Update active & 500dps full scale) | |
| Wire.endTransmission(); //End the transmission with the gyro | |
| Wire.beginTransmission(address); //Start communication with the gyro (adress 1101001) | |
| Wire.write(0x23); //Start reading @ register 28h and auto increment with every read | |
| Wire.endTransmission(); //End the transmission | |
| Wire.requestFrom(address, 1); //Request 6 bytes from the gyro | |
| while(Wire.available() < 1); //Wait until the 1 byte is received | |
| Serial.print(F("Register 0x23 is set to:")); | |
| Serial.println(Wire.read(),BIN); | |
| } | |
| //Setup the MPU-6050 | |
| if(type == 1){ | |
| Wire.beginTransmission(address); //Start communication with the gyro | |
| Wire.write(0x6B); //PWR_MGMT_1 register | |
| Wire.write(0x00); //Set to zero to turn on the gyro | |
| Wire.endTransmission(); //End the transmission | |
| Wire.beginTransmission(address); //Start communication with the gyro | |
| Wire.write(0x6B); //Start reading @ register 28h and auto increment with every read | |
| Wire.endTransmission(); //End the transmission | |
| Wire.requestFrom(address, 1); //Request 1 bytes from the gyro | |
| while(Wire.available() < 1); //Wait until the 1 byte is received | |
| Serial.print(F("Register 0x6B is set to:")); | |
| Serial.println(Wire.read(),BIN); | |
| Wire.beginTransmission(address); //Start communication with the gyro | |
| Wire.write(0x1B); //GYRO_CONFIG register | |
| Wire.write(0x08); //Set the register bits as 00001000 (500dps full scale) | |
| Wire.endTransmission(); //End the transmission | |
| Wire.beginTransmission(address); //Start communication with the gyro (adress 1101001) | |
| Wire.write(0x1B); //Start reading @ register 28h and auto increment with every read | |
| Wire.endTransmission(); //End the transmission | |
| Wire.requestFrom(address, 1); //Request 1 bytes from the gyro | |
| while(Wire.available() < 1); //Wait until the 1 byte is received | |
| Serial.print(F("Register 0x1B is set to:")); | |
| Serial.println(Wire.read(),BIN); | |
| } | |
| } | |
| void gyro_signalen(){ | |
| if(type == 2 || type == 3){ | |
| Wire.beginTransmission(address); //Start communication with the gyro | |
| Wire.write(168); //Start reading @ register 28h and auto increment with every read | |
| Wire.endTransmission(); //End the transmission | |
| Wire.requestFrom(address, 6); //Request 6 bytes from the gyro | |
| while(Wire.available() < 6); //Wait until the 6 bytes are received | |
| lowByte = Wire.read(); //First received byte is the low part of the angular data | |
| highByte = Wire.read(); //Second received byte is the high part of the angular data | |
| gyro_roll = ((highByte<<8)|lowByte); //Multiply highByte by 256 (shift left by 8) and ad lowByte | |
| if(cal_int == 2000)gyro_roll -= gyro_roll_cal; //Only compensate after the calibration | |
| lowByte = Wire.read(); //First received byte is the low part of the angular data | |
| highByte = Wire.read(); //Second received byte is the high part of the angular data | |
| gyro_pitch = ((highByte<<8)|lowByte); //Multiply highByte by 256 (shift left by 8) and ad lowByte | |
| if(cal_int == 2000)gyro_pitch -= gyro_pitch_cal; //Only compensate after the calibration | |
| lowByte = Wire.read(); //First received byte is the low part of the angular data | |
| highByte = Wire.read(); //Second received byte is the high part of the angular data | |
| gyro_yaw = ((highByte<<8)|lowByte); //Multiply highByte by 256 (shift left by 8) and ad lowByte | |
| if(cal_int == 2000)gyro_yaw -= gyro_yaw_cal; //Only compensate after the calibration | |
| } | |
| if(type == 1){ | |
| Wire.beginTransmission(address); //Start communication with the gyro | |
| Wire.write(0x43); //Start reading @ register 43h and auto increment with every read | |
| Wire.endTransmission(); //End the transmission | |
| Wire.requestFrom(address,6); //Request 6 bytes from the gyro | |
| while(Wire.available() < 6); //Wait until the 6 bytes are received | |
| gyro_roll=Wire.read()<<8|Wire.read(); //Read high and low part of the angular data | |
| if(cal_int == 2000)gyro_roll -= gyro_roll_cal; //Only compensate after the calibration | |
| gyro_pitch=Wire.read()<<8|Wire.read(); //Read high and low part of the angular data | |
| if(cal_int == 2000)gyro_pitch -= gyro_pitch_cal; //Only compensate after the calibration | |
| gyro_yaw=Wire.read()<<8|Wire.read(); //Read high and low part of the angular data | |
| if(cal_int == 2000)gyro_yaw -= gyro_yaw_cal; //Only compensate after the calibration | |
| } | |
| } | |
| //Check if a receiver input value is changing within 30 seconds | |
| void check_receiver_inputs(byte movement){ | |
| byte trigger = 0; | |
| int pulse_length; | |
| timer = millis() + 30000; | |
| while(timer > millis() && trigger == 0){ | |
| delay(250); | |
| if(receiver_input_channel_1 > 1750 || receiver_input_channel_1 < 1250){ | |
| trigger = 1; | |
| receiver_check_byte |= 0b00000001; | |
| pulse_length = receiver_input_channel_1; | |
| } | |
| if(receiver_input_channel_2 > 1750 || receiver_input_channel_2 < 1250){ | |
| trigger = 2; | |
| receiver_check_byte |= 0b00000010; | |
| pulse_length = receiver_input_channel_2; | |
| } | |
| if(receiver_input_channel_3 > 1750 || receiver_input_channel_3 < 1250){ | |
| trigger = 3; | |
| receiver_check_byte |= 0b00000100; | |
| pulse_length = receiver_input_channel_3; | |
| } | |
| if(receiver_input_channel_4 > 1750 || receiver_input_channel_4 < 1250){ | |
| trigger = 4; | |
| receiver_check_byte |= 0b00001000; | |
| pulse_length = receiver_input_channel_4; | |
| } | |
| } | |
| if(trigger == 0){ | |
| error = 1; | |
| Serial.println(F("No stick movement detected in the last 30 seconds!!! (ERROR 2)")); | |
| } | |
| //Assign the stick to the function. | |
| else{ | |
| if(movement == 1){ | |
| channel_3_assign = trigger; | |
| if(pulse_length < 1250)channel_3_assign += 0b10000000; | |
| } | |
| if(movement == 2){ | |
| channel_1_assign = trigger; | |
| if(pulse_length < 1250)channel_1_assign += 0b10000000; | |
| } | |
| if(movement == 3){ | |
| channel_2_assign = trigger; | |
| if(pulse_length < 1250)channel_2_assign += 0b10000000; | |
| } | |
| if(movement == 4){ | |
| channel_4_assign = trigger; | |
| if(pulse_length < 1250)channel_4_assign += 0b10000000; | |
| } | |
| } | |
| } | |
| void check_to_continue(){ | |
| byte continue_byte = 0; | |
| while(continue_byte == 0){ | |
| if(channel_2_assign == 0b00000001 && receiver_input_channel_1 > center_channel_1 + 150)continue_byte = 1; | |
| if(channel_2_assign == 0b10000001 && receiver_input_channel_1 < center_channel_1 - 150)continue_byte = 1; | |
| if(channel_2_assign == 0b00000010 && receiver_input_channel_2 > center_channel_2 + 150)continue_byte = 1; | |
| if(channel_2_assign == 0b10000010 && receiver_input_channel_2 < center_channel_2 - 150)continue_byte = 1; | |
| if(channel_2_assign == 0b00000011 && receiver_input_channel_3 > center_channel_3 + 150)continue_byte = 1; | |
| if(channel_2_assign == 0b10000011 && receiver_input_channel_3 < center_channel_3 - 150)continue_byte = 1; | |
| if(channel_2_assign == 0b00000100 && receiver_input_channel_4 > center_channel_4 + 150)continue_byte = 1; | |
| if(channel_2_assign == 0b10000100 && receiver_input_channel_4 < center_channel_4 - 150)continue_byte = 1; | |
| delay(100); | |
| } | |
| wait_sticks_zero(); | |
| } | |
| //Check if the transmitter sticks are in the neutral position | |
| void wait_sticks_zero(){ | |
| byte zero = 0; | |
| while(zero < 15){ | |
| if(receiver_input_channel_1 < center_channel_1 + 20 && receiver_input_channel_1 > center_channel_1 - 20)zero |= 0b00000001; | |
| if(receiver_input_channel_2 < center_channel_2 + 20 && receiver_input_channel_2 > center_channel_2 - 20)zero |= 0b00000010; | |
| if(receiver_input_channel_3 < center_channel_3 + 20 && receiver_input_channel_3 > center_channel_3 - 20)zero |= 0b00000100; | |
| if(receiver_input_channel_4 < center_channel_4 + 20 && receiver_input_channel_4 > center_channel_4 - 20)zero |= 0b00001000; | |
| delay(100); | |
| } | |
| } | |
| //Checck if the receiver values are valid within 10 seconds | |
| void wait_for_receiver(){ | |
| byte zero = 0; | |
| timer = millis() + 10000; | |
| while(timer > millis() && zero < 15){ | |
| if(receiver_input_channel_1 < 2100 && receiver_input_channel_1 > 900)zero |= 0b00000001; | |
| if(receiver_input_channel_2 < 2100 && receiver_input_channel_2 > 900)zero |= 0b00000010; | |
| if(receiver_input_channel_3 < 2100 && receiver_input_channel_3 > 900)zero |= 0b00000100; | |
| if(receiver_input_channel_4 < 2100 && receiver_input_channel_4 > 900)zero |= 0b00001000; | |
| delay(500); | |
| Serial.print(F(".")); | |
| } | |
| if(zero == 0){ | |
| error = 1; | |
| Serial.println(F(".")); | |
| Serial.println(F("No valid receiver signals found!!! (ERROR 1)")); | |
| } | |
| else Serial.println(F(" OK")); | |
| } | |
| //Register the min and max receiver values and exit when the sticks are back in the neutral position | |
| void register_min_max(){ | |
| byte zero = 0; | |
| low_channel_1 = receiver_input_channel_1; | |
| low_channel_2 = receiver_input_channel_2; | |
| low_channel_3 = receiver_input_channel_3; | |
| low_channel_4 = receiver_input_channel_4; | |
| while(receiver_input_channel_1 < center_channel_1 + 20 && receiver_input_channel_1 > center_channel_1 - 20)delay(250); | |
| Serial.println(F("Measuring endpoints....")); | |
| while(zero < 15){ | |
| if(receiver_input_channel_1 < center_channel_1 + 20 && receiver_input_channel_1 > center_channel_1 - 20)zero |= 0b00000001; | |
| if(receiver_input_channel_2 < center_channel_2 + 20 && receiver_input_channel_2 > center_channel_2 - 20)zero |= 0b00000010; | |
| if(receiver_input_channel_3 < center_channel_3 + 20 && receiver_input_channel_3 > center_channel_3 - 20)zero |= 0b00000100; | |
| if(receiver_input_channel_4 < center_channel_4 + 20 && receiver_input_channel_4 > center_channel_4 - 20)zero |= 0b00001000; | |
| if(receiver_input_channel_1 < low_channel_1)low_channel_1 = receiver_input_channel_1; | |
| if(receiver_input_channel_2 < low_channel_2)low_channel_2 = receiver_input_channel_2; | |
| if(receiver_input_channel_3 < low_channel_3)low_channel_3 = receiver_input_channel_3; | |
| if(receiver_input_channel_4 < low_channel_4)low_channel_4 = receiver_input_channel_4; | |
| if(receiver_input_channel_1 > high_channel_1)high_channel_1 = receiver_input_channel_1; | |
| if(receiver_input_channel_2 > high_channel_2)high_channel_2 = receiver_input_channel_2; | |
| if(receiver_input_channel_3 > high_channel_3)high_channel_3 = receiver_input_channel_3; | |
| if(receiver_input_channel_4 > high_channel_4)high_channel_4 = receiver_input_channel_4; | |
| delay(100); | |
| } | |
| } | |
| //Check if the angular position of a gyro axis is changing within 10 seconds | |
| void check_gyro_axes(byte movement){ | |
| byte trigger_axis = 0; | |
| float gyro_angle_roll, gyro_angle_pitch, gyro_angle_yaw; | |
| //Reset all axes | |
| gyro_angle_roll = 0; | |
| gyro_angle_pitch = 0; | |
| gyro_angle_yaw = 0; | |
| gyro_signalen(); | |
| timer = millis() + 10000; | |
| while(timer > millis() && gyro_angle_roll > -30 && gyro_angle_roll < 30 && gyro_angle_pitch > -30 && gyro_angle_pitch < 30 && gyro_angle_yaw > -30 && gyro_angle_yaw < 30){ | |
| gyro_signalen(); | |
| if(type == 2 || type == 3){ | |
| gyro_angle_roll += gyro_roll * 0.00007; //0.00007 = 17.5 (md/s) / 250(Hz) | |
| gyro_angle_pitch += gyro_pitch * 0.00007; | |
| gyro_angle_yaw += gyro_yaw * 0.00007; | |
| } | |
| if(type == 1){ | |
| gyro_angle_roll += gyro_roll * 0.0000611; // 0.0000611 = 1 / 65.5 (LSB degr/s) / 250(Hz) | |
| gyro_angle_pitch += gyro_pitch * 0.0000611; | |
| gyro_angle_yaw += gyro_yaw * 0.0000611; | |
| } | |
| delayMicroseconds(3700); //Loop is running @ 250Hz. +/-300us is used for communication with the gyro | |
| } | |
| //Assign the moved axis to the orresponding function (pitch, roll, yaw) | |
| if((gyro_angle_roll < -30 || gyro_angle_roll > 30) && gyro_angle_pitch > -30 && gyro_angle_pitch < 30 && gyro_angle_yaw > -30 && gyro_angle_yaw < 30){ | |
| gyro_check_byte |= 0b00000001; | |
| if(gyro_angle_roll < 0)trigger_axis = 0b10000001; | |
| else trigger_axis = 0b00000001; | |
| } | |
| if((gyro_angle_pitch < -30 || gyro_angle_pitch > 30) && gyro_angle_roll > -30 && gyro_angle_roll < 30 && gyro_angle_yaw > -30 && gyro_angle_yaw < 30){ | |
| gyro_check_byte |= 0b00000010; | |
| if(gyro_angle_pitch < 0)trigger_axis = 0b10000010; | |
| else trigger_axis = 0b00000010; | |
| } | |
| if((gyro_angle_yaw < -30 || gyro_angle_yaw > 30) && gyro_angle_roll > -30 && gyro_angle_roll < 30 && gyro_angle_pitch > -30 && gyro_angle_pitch < 30){ | |
| gyro_check_byte |= 0b00000100; | |
| if(gyro_angle_yaw < 0)trigger_axis = 0b10000011; | |
| else trigger_axis = 0b00000011; | |
| } | |
| if(trigger_axis == 0){ | |
| error = 1; | |
| Serial.println(F("No angular motion is detected in the last 10 seconds!!! (ERROR 4)")); | |
| } | |
| else | |
| if(movement == 1)roll_axis = trigger_axis; | |
| if(movement == 2)pitch_axis = trigger_axis; | |
| if(movement == 3)yaw_axis = trigger_axis; | |
| } | |
| //This routine is called every time input 8, 9, 10 or 11 changed state | |
| ISR(PCINT0_vect){ | |
| current_time = micros(); | |
| //Channel 1========================================= | |
| if(PINB & B00000001){ //Is input 8 high? | |
| if(last_channel_1 == 0){ //Input 8 changed from 0 to 1 | |
| last_channel_1 = 1; //Remember current input state | |
| timer_1 = current_time; //Set timer_1 to current_time | |
| } | |
| } | |
| else if(last_channel_1 == 1){ //Input 8 is not high and changed from 1 to 0 | |
| last_channel_1 = 0; //Remember current input state | |
| receiver_input_channel_1 = current_time - timer_1; //Channel 1 is current_time - timer_1 | |
| } | |
| //Channel 2========================================= | |
| if(PINB & B00000010 ){ //Is input 9 high? | |
| if(last_channel_2 == 0){ //Input 9 changed from 0 to 1 | |
| last_channel_2 = 1; //Remember current input state | |
| timer_2 = current_time; //Set timer_2 to current_time | |
| } | |
| } | |
| else if(last_channel_2 == 1){ //Input 9 is not high and changed from 1 to 0 | |
| last_channel_2 = 0; //Remember current input state | |
| receiver_input_channel_2 = current_time - timer_2; //Channel 2 is current_time - timer_2 | |
| } | |
| //Channel 3========================================= | |
| if(PINB & B00000100 ){ //Is input 10 high? | |
| if(last_channel_3 == 0){ //Input 10 changed from 0 to 1 | |
| last_channel_3 = 1; //Remember current input state | |
| timer_3 = current_time; //Set timer_3 to current_time | |
| } | |
| } | |
| else if(last_channel_3 == 1){ //Input 10 is not high and changed from 1 to 0 | |
| last_channel_3 = 0; //Remember current input state | |
| receiver_input_channel_3 = current_time - timer_3; //Channel 3 is current_time - timer_3 | |
| } | |
| //Channel 4========================================= | |
| if(PINB & B00001000 ){ //Is input 11 high? | |
| if(last_channel_4 == 0){ //Input 11 changed from 0 to 1 | |
| last_channel_4 = 1; //Remember current input state | |
| timer_4 = current_time; //Set timer_4 to current_time | |
| } | |
| } | |
| else if(last_channel_4 == 1){ //Input 11 is not high and changed from 1 to 0 | |
| last_channel_4 = 0; //Remember current input state | |
| receiver_input_channel_4 = current_time - timer_4; //Channel 4 is current_time - timer_4 | |
| } | |
| } | |
| //Intro subroutine | |
| void intro(){ | |
| Serial.println(F("===================================================")); | |
| delay(1500); | |
| Serial.println(F("")); | |
| Serial.println(F("Your")); | |
| delay(500); | |
| Serial.println(F(" Multicopter")); | |
| delay(500); | |
| Serial.println(F(" Flight")); | |
| delay(500); | |
| Serial.println(F(" Controller")); | |
| delay(1000); | |
| Serial.println(F("")); | |
| Serial.println(F("YMFC-AL Setup Program")); | |
| Serial.println(F("")); | |
| Serial.println(F("===================================================")); | |
| delay(1500); | |
| Serial.println(F("For support and questions: www.brokking.net")); | |
| Serial.println(F("")); | |
| Serial.println(F("Have fun!")); | |
| } |
| #include <Wire.h> //Include the Wire.h library so we can communicate with the gyro. | |
| #include <EEPROM.h> //Include the EEPROM.h library so we can store information onto the EEPROM | |
| //Declaring global variables | |
| byte last_channel_1, last_channel_2, last_channel_3, last_channel_4; | |
| byte eeprom_data[36], start, data; | |
| boolean new_function_request,first_angle; | |
| volatile int receiver_input_channel_1, receiver_input_channel_2, receiver_input_channel_3, receiver_input_channel_4; | |
| int esc_1, esc_2, esc_3, esc_4; | |
| int counter_channel_1, counter_channel_2, counter_channel_3, counter_channel_4; | |
| int receiver_input[5]; | |
| int loop_counter, gyro_address, vibration_counter; | |
| int temperature; | |
| long acc_x, acc_y, acc_z, acc_total_vector[20], acc_av_vector, vibration_total_result; | |
| unsigned long timer_channel_1, timer_channel_2, timer_channel_3, timer_channel_4, esc_timer, esc_loop_timer; | |
| unsigned long zero_timer, timer_1, timer_2, timer_3, timer_4, current_time; | |
| int acc_axis[4], gyro_axis[4]; | |
| double gyro_pitch, gyro_roll, gyro_yaw; | |
| float angle_roll_acc, angle_pitch_acc, angle_pitch, angle_roll; | |
| int cal_int; | |
| double gyro_axis_cal[4]; | |
| //Setup routine | |
| void setup(){ | |
| Serial.begin(57600); //Start the serial port. | |
| Wire.begin(); //Start the wire library as master | |
| TWBR = 12; //Set the I2C clock speed to 400kHz. | |
| //Arduino Uno pins default to inputs, so they don't need to be explicitly declared as inputs. | |
| DDRD |= B11110000; //Configure digital poort 4, 5, 6 and 7 as output. | |
| DDRB |= B00010000; //Configure digital poort 12 as output. | |
| PCICR |= (1 << PCIE0); // set PCIE0 to enable PCMSK0 scan. | |
| PCMSK0 |= (1 << PCINT0); // set PCINT0 (digital input 8) to trigger an interrupt on state change. | |
| PCMSK0 |= (1 << PCINT1); // set PCINT1 (digital input 9)to trigger an interrupt on state change. | |
| PCMSK0 |= (1 << PCINT2); // set PCINT2 (digital input 10)to trigger an interrupt on state change. | |
| PCMSK0 |= (1 << PCINT3); // set PCINT3 (digital input 11)to trigger an interrupt on state change. | |
| for(data = 0; data <= 35; data++)eeprom_data[data] = EEPROM.read(data); //Read EEPROM for faster data access | |
| gyro_address = eeprom_data[32]; //Store the gyro address in the variable. | |
| set_gyro_registers(); //Set the specific gyro registers. | |
| //Check the EEPROM signature to make sure that the setup program is executed. | |
| while(eeprom_data[33] != 'J' || eeprom_data[34] != 'M' || eeprom_data[35] != 'B'){ | |
| delay(500); //Wait for 500ms. | |
| digitalWrite(12, !digitalRead(12)); //Change the led status to indicate error. | |
| } | |
| wait_for_receiver(); //Wait until the receiver is active. | |
| zero_timer = micros(); //Set the zero_timer for the first loop. | |
| while(Serial.available())data = Serial.read(); //Empty the serial buffer. | |
| data = 0; //Set the data variable back to zero. | |
| } | |
| //Main program loop | |
| void loop(){ | |
| while(zero_timer + 4000 > micros()); //Start the pulse after 4000 micro seconds. | |
| zero_timer = micros(); //Reset the zero timer. | |
| if(Serial.available() > 0){ | |
| data = Serial.read(); //Read the incomming byte. | |
| delay(100); //Wait for any other bytes to come in | |
| while(Serial.available() > 0)loop_counter = Serial.read(); //Empty the Serial buffer. | |
| new_function_request = true; //Set the new request flag. | |
| loop_counter = 0; //Reset the loop_counter variable. | |
| cal_int = 0; //Reset the cal_int variable to undo the calibration. | |
| start = 0; //Set start to 0. | |
| first_angle = false; //Set first_angle to false. | |
| //Confirm the choice on the serial monitor. | |
| if(data == 'r')Serial.println("Reading receiver signals."); | |
| if(data == 'a')Serial.println("Print the quadcopter angles."); | |
| if(data == 'a')Serial.println("Gyro calibration starts in 2 seconds (don't move the quadcopter)."); | |
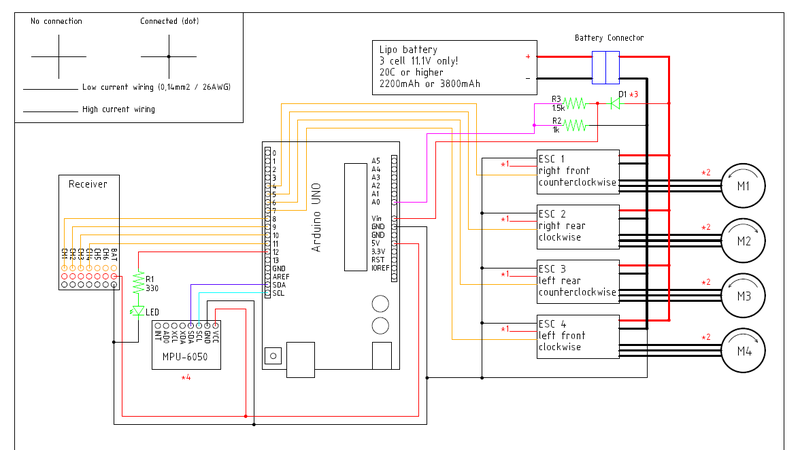
| if(data == '1')Serial.println("Test motor 1 (right front CCW.)"); | |
| if(data == '2')Serial.println("Test motor 2 (right rear CW.)"); | |
| if(data == '3')Serial.println("Test motor 3 (left rear CCW.)"); | |
| if(data == '4')Serial.println("Test motor 4 (left front CW.)"); | |
| if(data == '5')Serial.println("Test all motors together"); | |
| //Let's create a small delay so the message stays visible for 2.5 seconds. | |
| //We don't want the ESC's to beep and have to send a 1000us pulse to the ESC's. | |
| for(vibration_counter = 0; vibration_counter < 625; vibration_counter++){ //Do this loop 625 times | |
| delay(3); //Wait 3000us. | |
| esc_1 = 1000; //Set the pulse for ESC 1 to 1000us. | |
| esc_2 = 1000; //Set the pulse for ESC 1 to 1000us. | |
| esc_3 = 1000; //Set the pulse for ESC 1 to 1000us. | |
| esc_4 = 1000; //Set the pulse for ESC 1 to 1000us. | |
| esc_pulse_output(); //Send the ESC control pulses. | |
| } | |
| vibration_counter = 0; //Reset the vibration_counter variable. | |
| } | |
| receiver_input_channel_3 = convert_receiver_channel(3); //Convert the actual receiver signals for throttle to the standard 1000 - 2000us. | |
| if(receiver_input_channel_3 < 1025)new_function_request = false; //If the throttle is in the lowest position set the request flag to false. | |
| //////////////////////////////////////////////////////////////////////////////////////////// | |
| //Run the ESC calibration program to start with. | |
| //////////////////////////////////////////////////////////////////////////////////////////// | |
| if(data == 0 && new_function_request == false){ //Only start the calibration mode at first start. | |
| receiver_input_channel_3 = convert_receiver_channel(3); //Convert the actual receiver signals for throttle to the standard 1000 - 2000us. | |
| esc_1 = receiver_input_channel_3; //Set the pulse for motor 1 equal to the throttle channel. | |
| esc_2 = receiver_input_channel_3; //Set the pulse for motor 2 equal to the throttle channel. | |
| esc_3 = receiver_input_channel_3; //Set the pulse for motor 3 equal to the throttle channel. | |
| esc_4 = receiver_input_channel_3; //Set the pulse for motor 4 equal to the throttle channel. | |
| esc_pulse_output(); //Send the ESC control pulses. | |
| } | |
| //////////////////////////////////////////////////////////////////////////////////////////// | |
| //When user sends a 'r' print the receiver signals. | |
| //////////////////////////////////////////////////////////////////////////////////////////// | |
| if(data == 'r'){ | |
| loop_counter ++; //Increase the loop_counter variable. | |
| receiver_input_channel_1 = convert_receiver_channel(1); //Convert the actual receiver signals for pitch to the standard 1000 - 2000us. | |
| receiver_input_channel_2 = convert_receiver_channel(2); //Convert the actual receiver signals for roll to the standard 1000 - 2000us. | |
| receiver_input_channel_3 = convert_receiver_channel(3); //Convert the actual receiver signals for throttle to the standard 1000 - 2000us. | |
| receiver_input_channel_4 = convert_receiver_channel(4); //Convert the actual receiver signals for yaw to the standard 1000 - 2000us. | |
| if(loop_counter == 125){ //Print the receiver values when the loop_counter variable equals 250. | |
| print_signals(); //Print the receiver values on the serial monitor. | |
| loop_counter = 0; //Reset the loop_counter variable. | |
| } | |
| //For starting the motors: throttle low and yaw left (step 1). | |
| if(receiver_input_channel_3 < 1050 && receiver_input_channel_4 < 1050)start = 1; | |
| //When yaw stick is back in the center position start the motors (step 2). | |
| if(start == 1 && receiver_input_channel_3 < 1050 && receiver_input_channel_4 > 1450)start = 2; | |
| //Stopping the motors: throttle low and yaw right. | |
| if(start == 2 && receiver_input_channel_3 < 1050 && receiver_input_channel_4 > 1950)start = 0; | |
| esc_1 = 1000; //Set the pulse for ESC 1 to 1000us. | |
| esc_2 = 1000; //Set the pulse for ESC 1 to 1000us. | |
| esc_3 = 1000; //Set the pulse for ESC 1 to 1000us. | |
| esc_4 = 1000; //Set the pulse for ESC 1 to 1000us. | |
| esc_pulse_output(); //Send the ESC control pulses. | |
| } | |
| /////////////////////////////////////////////////////////////////////////////////////////// | |
| //When user sends a '1, 2, 3, 4 or 5 test the motors. | |
| //////////////////////////////////////////////////////////////////////////////////////////// | |
| if(data == '1' || data == '2' || data == '3' || data == '4' || data == '5'){ //If motor 1, 2, 3 or 4 is selected by the user. | |
| loop_counter ++; //Add 1 to the loop_counter variable. | |
| if(new_function_request == true && loop_counter == 250){ //Wait for the throttle to be set to 0. | |
| Serial.print("Set throttle to 1000 (low). It's now set to: "); //Print message on the serial monitor. | |
| Serial.println(receiver_input_channel_3); //Print the actual throttle position. | |
| loop_counter = 0; //Reset the loop_counter variable. | |
| } | |
| if(new_function_request == false){ //When the throttle was in the lowest position do this. | |
| receiver_input_channel_3 = convert_receiver_channel(3); //Convert the actual receiver signals for throttle to the standard 1000 - 2000us. | |
| if(data == '1' || data == '5')esc_1 = receiver_input_channel_3; //If motor 1 is requested set the pulse for motor 1 equal to the throttle channel. | |
| else esc_1 = 1000; //If motor 1 is not requested set the pulse for the ESC to 1000us (off). | |
| if(data == '2' || data == '5')esc_2 = receiver_input_channel_3; //If motor 2 is requested set the pulse for motor 1 equal to the throttle channel. | |
| else esc_2 = 1000; //If motor 2 is not requested set the pulse for the ESC to 1000us (off). | |
| if(data == '3' || data == '5')esc_3 = receiver_input_channel_3; //If motor 3 is requested set the pulse for motor 1 equal to the throttle channel. | |
| else esc_3 = 1000; //If motor 3 is not requested set the pulse for the ESC to 1000us (off). | |
| if(data == '4' || data == '5')esc_4 = receiver_input_channel_3; //If motor 4 is requested set the pulse for motor 1 equal to the throttle channel. | |
| else esc_4 = 1000; //If motor 4 is not requested set the pulse for the ESC to 1000us (off). | |
| esc_pulse_output(); //Send the ESC control pulses. | |
| //For balancing the propellors it's possible to use the accelerometer to measure the vibrations. | |
| if(eeprom_data[31] == 1){ //The MPU-6050 is installed | |
| Wire.beginTransmission(gyro_address); //Start communication with the gyro. | |
| Wire.write(0x3B); //Start reading @ register 43h and auto increment with every read. | |
| Wire.endTransmission(); //End the transmission. | |
| Wire.requestFrom(gyro_address,6); //Request 6 bytes from the gyro. | |
| while(Wire.available() < 6); //Wait until the 6 bytes are received. | |
| acc_x = Wire.read()<<8|Wire.read(); //Add the low and high byte to the acc_x variable. | |
| acc_y = Wire.read()<<8|Wire.read(); //Add the low and high byte to the acc_y variable. | |
| acc_z = Wire.read()<<8|Wire.read(); //Add the low and high byte to the acc_z variable. | |
| acc_total_vector[0] = sqrt((acc_x*acc_x)+(acc_y*acc_y)+(acc_z*acc_z)); //Calculate the total accelerometer vector. | |
| acc_av_vector = acc_total_vector[0]; //Copy the total vector to the accelerometer average vector variable. | |
| for(start = 16; start > 0; start--){ //Do this loop 16 times to create an array of accelrometer vectors. | |
| acc_total_vector[start] = acc_total_vector[start - 1]; //Shift every variable one position up in the array. | |
| acc_av_vector += acc_total_vector[start]; //Add the array value to the acc_av_vector variable. | |
| } | |
| acc_av_vector /= 17; //Divide the acc_av_vector by 17 to get the avarage total accelerometer vector. | |
| if(vibration_counter < 20){ //If the vibration_counter is less than 20 do this. | |
| vibration_counter ++; //Increment the vibration_counter variable. | |
| vibration_total_result += abs(acc_total_vector[0] - acc_av_vector); //Add the absolute difference between the avarage vector and current vector to the vibration_total_result variable. | |
| } | |
| else{ | |
| vibration_counter = 0; //If the vibration_counter is equal or larger than 20 do this. | |
| Serial.println(vibration_total_result/50); //Print the total accelerometer vector divided by 50 on the serial monitor. | |
| vibration_total_result = 0; //Reset the vibration_total_result variable. | |
| } | |
| } | |
| } | |
| } | |
| /////////////////////////////////////////////////////////////////////////////////////////// | |
| //When user sends a 'a' display the quadcopter angles. | |
| //////////////////////////////////////////////////////////////////////////////////////////// | |
| if(data == 'a'){ | |
| if(cal_int != 2000){ | |
| Serial.print("Calibrating the gyro"); | |
| //Let's take multiple gyro data samples so we can determine the average gyro offset (calibration). | |
| for (cal_int = 0; cal_int < 2000 ; cal_int ++){ //Take 2000 readings for calibration. | |
| if(cal_int % 125 == 0){ | |
| digitalWrite(12, !digitalRead(12)); //Change the led status to indicate calibration. | |
| Serial.print("."); | |
| } | |
| gyro_signalen(); //Read the gyro output. | |
| gyro_axis_cal[1] += gyro_axis[1]; //Ad roll value to gyro_roll_cal. | |
| gyro_axis_cal[2] += gyro_axis[2]; //Ad pitch value to gyro_pitch_cal. | |
| gyro_axis_cal[3] += gyro_axis[3]; //Ad yaw value to gyro_yaw_cal. | |
| //We don't want the esc's to be beeping annoyingly. So let's give them a 1000us puls while calibrating the gyro. | |
| PORTD |= B11110000; //Set digital poort 4, 5, 6 and 7 high. | |
| delayMicroseconds(1000); //Wait 1000us. | |
| PORTD &= B00001111; //Set digital poort 4, 5, 6 and 7 low. | |
| delay(3); //Wait 3 milliseconds before the next loop. | |
| } | |
| Serial.println("."); | |
| //Now that we have 2000 measures, we need to devide by 2000 to get the average gyro offset. | |
| gyro_axis_cal[1] /= 2000; //Divide the roll total by 2000. | |
| gyro_axis_cal[2] /= 2000; //Divide the pitch total by 2000. | |
| gyro_axis_cal[3] /= 2000; //Divide the yaw total by 2000. | |
| } | |
| else{ | |
| ///We don't want the esc's to be beeping annoyingly. So let's give them a 1000us puls while calibrating the gyro. | |
| PORTD |= B11110000; //Set digital poort 4, 5, 6 and 7 high. | |
| delayMicroseconds(1000); //Wait 1000us. | |
| PORTD &= B00001111; //Set digital poort 4, 5, 6 and 7 low. | |
| //Let's get the current gyro data. | |
| gyro_signalen(); | |
| //Gyro angle calculations | |
| //0.0000611 = 1 / (250Hz / 65.5) | |
| angle_pitch += gyro_pitch * 0.0000611; //Calculate the traveled pitch angle and add this to the angle_pitch variable. | |
| angle_roll += gyro_roll * 0.0000611; //Calculate the traveled roll angle and add this to the angle_roll variable. | |
| //0.000001066 = 0.0000611 * (3.142(PI) / 180degr) The Arduino sin function is in radians | |
| angle_pitch -= angle_roll * sin(gyro_yaw * 0.000001066); //If the IMU has yawed transfer the roll angle to the pitch angel. | |
| angle_roll += angle_pitch * sin(gyro_yaw * 0.000001066); //If the IMU has yawed transfer the pitch angle to the roll angel. | |
| //Accelerometer angle calculations | |
| acc_total_vector[0] = sqrt((acc_x*acc_x)+(acc_y*acc_y)+(acc_z*acc_z)); //Calculate the total accelerometer vector. | |
| //57.296 = 1 / (3.142 / 180) The Arduino asin function is in radians | |
| angle_pitch_acc = asin((float)acc_y/acc_total_vector[0])* 57.296; //Calculate the pitch angle. | |
| angle_roll_acc = asin((float)acc_x/acc_total_vector[0])* -57.296; //Calculate the roll angle. | |
| if(!first_angle){ | |
| angle_pitch = angle_pitch_acc; //Set the pitch angle to the accelerometer angle. | |
| angle_roll = angle_roll_acc; //Set the roll angle to the accelerometer angle. | |
| first_angle = true; | |
| } | |
| else{ | |
| angle_pitch = angle_pitch * 0.9996 + angle_pitch_acc * 0.0004; //Correct the drift of the gyro pitch angle with the accelerometer pitch angle. | |
| angle_roll = angle_roll * 0.9996 + angle_roll_acc * 0.0004; //Correct the drift of the gyro roll angle with the accelerometer roll angle. | |
| } | |
| //We can't print all the data at once. This takes to long and the angular readings will be off. | |
| if(loop_counter == 0)Serial.print("Pitch: "); | |
| if(loop_counter == 1)Serial.print(angle_pitch ,0); | |
| if(loop_counter == 2)Serial.print(" Roll: "); | |
| if(loop_counter == 3)Serial.print(angle_roll ,0); | |
| if(loop_counter == 4)Serial.print(" Yaw: "); | |
| if(loop_counter == 5)Serial.println(gyro_yaw / 65.5 ,0); | |
| loop_counter ++; | |
| if(loop_counter == 60)loop_counter = 0; | |
| } | |
| } | |
| } | |
| //This routine is called every time input 8, 9, 10 or 11 changed state. | |
| ISR(PCINT0_vect){ | |
| current_time = micros(); | |
| //Channel 1========================================= | |
| if(PINB & B00000001){ //Is input 8 high? | |
| if(last_channel_1 == 0){ //Input 8 changed from 0 to 1. | |
| last_channel_1 = 1; //Remember current input state. | |
| timer_1 = current_time; //Set timer_1 to current_time. | |
| } | |
| } | |
| else if(last_channel_1 == 1){ //Input 8 is not high and changed from 1 to 0. | |
| last_channel_1 = 0; //Remember current input state. | |
| receiver_input[1] = current_time - timer_1; //Channel 1 is current_time - timer_1. | |
| } | |
| //Channel 2========================================= | |
| if(PINB & B00000010 ){ //Is input 9 high? | |
| if(last_channel_2 == 0){ //Input 9 changed from 0 to 1. | |
| last_channel_2 = 1; //Remember current input state. | |
| timer_2 = current_time; //Set timer_2 to current_time. | |
| } | |
| } | |
| else if(last_channel_2 == 1){ //Input 9 is not high and changed from 1 to 0. | |
| last_channel_2 = 0; //Remember current input state. | |
| receiver_input[2] = current_time - timer_2; //Channel 2 is current_time - timer_2. | |
| } | |
| //Channel 3========================================= | |
| if(PINB & B00000100 ){ //Is input 10 high? | |
| if(last_channel_3 == 0){ //Input 10 changed from 0 to 1. | |
| last_channel_3 = 1; //Remember current input state. | |
| timer_3 = current_time; //Set timer_3 to current_time. | |
| } | |
| } | |
| else if(last_channel_3 == 1){ //Input 10 is not high and changed from 1 to 0. | |
| last_channel_3 = 0; //Remember current input state. | |
| receiver_input[3] = current_time - timer_3; //Channel 3 is current_time - timer_3. | |
| } | |
| //Channel 4========================================= | |
| if(PINB & B00001000 ){ //Is input 11 high? | |
| if(last_channel_4 == 0){ //Input 11 changed from 0 to 1. | |
| last_channel_4 = 1; //Remember current input state. | |
| timer_4 = current_time; //Set timer_4 to current_time. | |
| } | |
| } | |
| else if(last_channel_4 == 1){ //Input 11 is not high and changed from 1 to 0. | |
| last_channel_4 = 0; //Remember current input state. | |
| receiver_input[4] = current_time - timer_4; //Channel 4 is current_time - timer_4. | |
| } | |
| } | |
| //Checck if the receiver values are valid within 10 seconds | |
| void wait_for_receiver(){ | |
| byte zero = 0; //Set all bits in the variable zero to 0 | |
| while(zero < 15){ //Stay in this loop until the 4 lowest bits are set | |
| if(receiver_input[1] < 2100 && receiver_input[1] > 900)zero |= 0b00000001; //Set bit 0 if the receiver pulse 1 is within the 900 - 2100 range | |
| if(receiver_input[2] < 2100 && receiver_input[2] > 900)zero |= 0b00000010; //Set bit 1 if the receiver pulse 2 is within the 900 - 2100 range | |
| if(receiver_input[3] < 2100 && receiver_input[3] > 900)zero |= 0b00000100; //Set bit 2 if the receiver pulse 3 is within the 900 - 2100 range | |
| if(receiver_input[4] < 2100 && receiver_input[4] > 900)zero |= 0b00001000; //Set bit 3 if the receiver pulse 4 is within the 900 - 2100 range | |
| delay(500); //Wait 500 milliseconds | |
| } | |
| } | |
| //This part converts the actual receiver signals to a standardized 1000 – 1500 – 2000 microsecond value. | |
| //The stored data in the EEPROM is used. | |
| int convert_receiver_channel(byte function){ | |
| byte channel, reverse; //First we declare some local variables | |
| int low, center, high, actual; | |
| int difference; | |
| channel = eeprom_data[function + 23] & 0b00000111; //What channel corresponds with the specific function | |
| if(eeprom_data[function + 23] & 0b10000000)reverse = 1; //Reverse channel when most significant bit is set | |
| else reverse = 0; //If the most significant is not set there is no reverse | |
| actual = receiver_input[channel]; //Read the actual receiver value for the corresponding function | |
| low = (eeprom_data[channel * 2 + 15] << 8) | eeprom_data[channel * 2 + 14]; //Store the low value for the specific receiver input channel | |
| center = (eeprom_data[channel * 2 - 1] << 8) | eeprom_data[channel * 2 - 2]; //Store the center value for the specific receiver input channel | |
| high = (eeprom_data[channel * 2 + 7] << 8) | eeprom_data[channel * 2 + 6]; //Store the high value for the specific receiver input channel | |
| if(actual < center){ //The actual receiver value is lower than the center value | |
| if(actual < low)actual = low; //Limit the lowest value to the value that was detected during setup | |
| difference = ((long)(center - actual) * (long)500) / (center - low); //Calculate and scale the actual value to a 1000 - 2000us value | |
| if(reverse == 1)return 1500 + difference; //If the channel is reversed | |
| else return 1500 - difference; //If the channel is not reversed | |
| } | |
| else if(actual > center){ //The actual receiver value is higher than the center value | |
| if(actual > high)actual = high; //Limit the lowest value to the value that was detected during setup | |
| difference = ((long)(actual - center) * (long)500) / (high - center); //Calculate and scale the actual value to a 1000 - 2000us value | |
| if(reverse == 1)return 1500 - difference; //If the channel is reversed | |
| else return 1500 + difference; //If the channel is not reversed | |
| } | |
| else return 1500; | |
| } | |
| void print_signals(){ | |
| Serial.print("Start:"); | |
| Serial.print(start); | |
| Serial.print(" Roll:"); | |
| if(receiver_input_channel_1 - 1480 < 0)Serial.print("<<<"); | |
| else if(receiver_input_channel_1 - 1520 > 0)Serial.print(">>>"); | |
| else Serial.print("-+-"); | |
| Serial.print(receiver_input_channel_1); | |
| Serial.print(" Pitch:"); | |
| if(receiver_input_channel_2 - 1480 < 0)Serial.print("^^^"); | |
| else if(receiver_input_channel_2 - 1520 > 0)Serial.print("vvv"); | |
| else Serial.print("-+-"); | |
| Serial.print(receiver_input_channel_2); | |
| Serial.print(" Throttle:"); | |
| if(receiver_input_channel_3 - 1480 < 0)Serial.print("vvv"); | |
| else if(receiver_input_channel_3 - 1520 > 0)Serial.print("^^^"); | |
| else Serial.print("-+-"); | |
| Serial.print(receiver_input_channel_3); | |
| Serial.print(" Yaw:"); | |
| if(receiver_input_channel_4 - 1480 < 0)Serial.print("<<<"); | |
| else if(receiver_input_channel_4 - 1520 > 0)Serial.print(">>>"); | |
| else Serial.print("-+-"); | |
| Serial.println(receiver_input_channel_4); | |
| } | |
| void esc_pulse_output(){ | |
| zero_timer = micros(); | |
| PORTD |= B11110000; //Set port 4, 5, 6 and 7 high at once | |
| timer_channel_1 = esc_1 + zero_timer; //Calculate the time when digital port 4 is set low. | |
| timer_channel_2 = esc_2 + zero_timer; //Calculate the time when digital port 5 is set low. | |
| timer_channel_3 = esc_3 + zero_timer; //Calculate the time when digital port 6 is set low. | |
| timer_channel_4 = esc_4 + zero_timer; //Calculate the time when digital port 7 is set low. | |
| while(PORTD >= 16){ //Execute the loop until digital port 4 to 7 is low. | |
| esc_loop_timer = micros(); //Check the current time. | |
| if(timer_channel_1 <= esc_loop_timer)PORTD &= B11101111; //When the delay time is expired, digital port 4 is set low. | |
| if(timer_channel_2 <= esc_loop_timer)PORTD &= B11011111; //When the delay time is expired, digital port 5 is set low. | |
| if(timer_channel_3 <= esc_loop_timer)PORTD &= B10111111; //When the delay time is expired, digital port 6 is set low. | |
| if(timer_channel_4 <= esc_loop_timer)PORTD &= B01111111; //When the delay time is expired, digital port 7 is set low. | |
| } | |
| } | |
| void set_gyro_registers(){ | |
| //Setup the MPU-6050 | |
| if(eeprom_data[31] == 1){ | |
| Wire.beginTransmission(gyro_address); //Start communication with the address found during search. | |
| Wire.write(0x6B); //We want to write to the PWR_MGMT_1 register (6B hex) | |
| Wire.write(0x00); //Set the register bits as 00000000 to activate the gyro | |
| Wire.endTransmission(); //End the transmission with the gyro. | |
| Wire.beginTransmission(gyro_address); //Start communication with the address found during search. | |
| Wire.write(0x1B); //We want to write to the GYRO_CONFIG register (1B hex) | |
| Wire.write(0x08); //Set the register bits as 00001000 (500dps full scale) | |
| Wire.endTransmission(); //End the transmission with the gyro | |
| Wire.beginTransmission(gyro_address); //Start communication with the address found during search. | |
| Wire.write(0x1C); //We want to write to the ACCEL_CONFIG register (1A hex) | |
| Wire.write(0x10); //Set the register bits as 00010000 (+/- 8g full scale range) | |
| Wire.endTransmission(); //End the transmission with the gyro | |
| //Let's perform a random register check to see if the values are written correct | |
| Wire.beginTransmission(gyro_address); //Start communication with the address found during search | |
| Wire.write(0x1B); //Start reading @ register 0x1B | |
| Wire.endTransmission(); //End the transmission | |
| Wire.requestFrom(gyro_address, 1); //Request 1 bytes from the gyro | |
| while(Wire.available() < 1); //Wait until the 6 bytes are received | |
| if(Wire.read() != 0x08){ //Check if the value is 0x08 | |
| digitalWrite(12,HIGH); //Turn on the warning led | |
| while(1)delay(10); //Stay in this loop for ever | |
| } | |
| Wire.beginTransmission(gyro_address); //Start communication with the address found during search | |
| Wire.write(0x1A); //We want to write to the CONFIG register (1A hex) | |
| Wire.write(0x03); //Set the register bits as 00000011 (Set Digital Low Pass Filter to ~43Hz) | |
| Wire.endTransmission(); //End the transmission with the gyro | |
| } | |
| } | |
| void gyro_signalen(){ | |
| //Read the MPU-6050 | |
| if(eeprom_data[31] == 1){ | |
| Wire.beginTransmission(gyro_address); //Start communication with the gyro. | |
| Wire.write(0x3B); //Start reading @ register 43h and auto increment with every read. | |
| Wire.endTransmission(); //End the transmission. | |
| Wire.requestFrom(gyro_address,14); //Request 14 bytes from the gyro. | |
| while(Wire.available() < 14); //Wait until the 14 bytes are received. | |
| acc_axis[1] = Wire.read()<<8|Wire.read(); //Add the low and high byte to the acc_x variable. | |
| acc_axis[2] = Wire.read()<<8|Wire.read(); //Add the low and high byte to the acc_y variable. | |
| acc_axis[3] = Wire.read()<<8|Wire.read(); //Add the low and high byte to the acc_z variable. | |
| temperature = Wire.read()<<8|Wire.read(); //Add the low and high byte to the temperature variable. | |
| gyro_axis[1] = Wire.read()<<8|Wire.read(); //Read high and low part of the angular data. | |
| gyro_axis[2] = Wire.read()<<8|Wire.read(); //Read high and low part of the angular data. | |
| gyro_axis[3] = Wire.read()<<8|Wire.read(); //Read high and low part of the angular data. | |
| } | |
| if(cal_int == 2000){ | |
| gyro_axis[1] -= gyro_axis_cal[1]; //Only compensate after the calibration. | |
| gyro_axis[2] -= gyro_axis_cal[2]; //Only compensate after the calibration. | |
| gyro_axis[3] -= gyro_axis_cal[3]; //Only compensate after the calibration. | |
| } | |
| gyro_roll = gyro_axis[eeprom_data[28] & 0b00000011]; //Set gyro_roll to the correct axis that was stored in the EEPROM. | |
| if(eeprom_data[28] & 0b10000000)gyro_roll *= -1; //Invert gyro_roll if the MSB of EEPROM bit 28 is set. | |
| gyro_pitch = gyro_axis[eeprom_data[29] & 0b00000011]; //Set gyro_pitch to the correct axis that was stored in the EEPROM. | |
| if(eeprom_data[29] & 0b10000000)gyro_pitch *= -1; //Invert gyro_pitch if the MSB of EEPROM bit 29 is set. | |
| gyro_yaw = gyro_axis[eeprom_data[30] & 0b00000011]; //Set gyro_yaw to the correct axis that was stored in the EEPROM. | |
| if(eeprom_data[30] & 0b10000000)gyro_yaw *= -1; //Invert gyro_yaw if the MSB of EEPROM bit 30 is set. | |
| acc_x = acc_axis[eeprom_data[29] & 0b00000011]; //Set acc_x to the correct axis that was stored in the EEPROM. | |
| if(eeprom_data[29] & 0b10000000)acc_x *= -1; //Invert acc_x if the MSB of EEPROM bit 29 is set. | |
| acc_y = acc_axis[eeprom_data[28] & 0b00000011]; //Set acc_y to the correct axis that was stored in the EEPROM. | |
| if(eeprom_data[28] & 0b10000000)acc_y *= -1; //Invert acc_y if the MSB of EEPROM bit 28 is set. | |
| acc_z = acc_axis[eeprom_data[30] & 0b00000011]; //Set acc_z to the correct axis that was stored in the EEPROM. | |
| if(eeprom_data[30] & 0b10000000)acc_z *= -1; //Invert acc_z if the MSB of EEPROM bit 30 is set. | |
| } |