
MidDayDreams| Up, Out, and Away!
Team Updates
Assemble Different Modules of JWST

A Wavelength
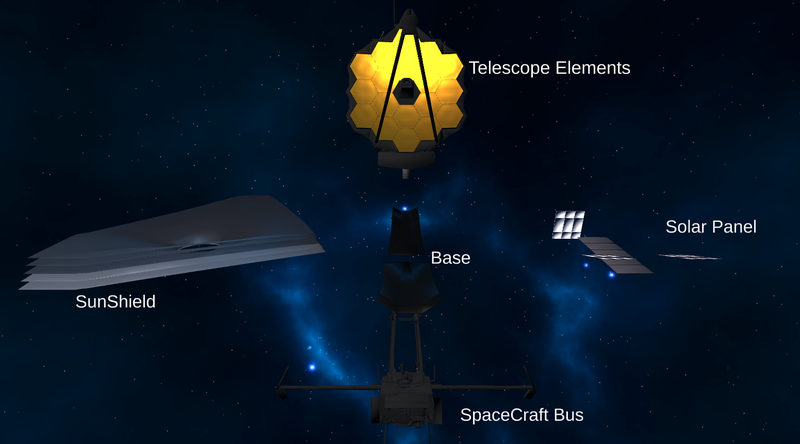
Modules of James Webb Space Telescope
This file contains hidden or bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters. Learn more about bidirectional Unicode characters
| usingSystem.Collections; | |
| usingSystem.Collections.Generic; | |
| usingUnityEngine; | |
| usingUnityEngine.UI; | |
| usingUnityEngine.SceneManagement; | |
| publicclassAriane5Launcher:MonoBehaviour{ | |
| publicGameObjectsmokeTrail1,smokeTrail2,smokeTrail3,smokeTrail4; | |
| privateTransformtr; | |
| publicfloatspeed=5; | |
| publicGameObjectwayPoints; | |
| boolcheckCam; | |
| boolcheckfinalcam; | |
| publicTimeManagertimeM; | |
| publicboolpart12X,part3X,noseX,part4X; | |
| //public Button pressButton; | |
| //public bool buttonpressed; | |
| publicGameObjectVcam1,Vcam2,Vcam3; | |
| publicGameObjectpart1,part2,part3,part4,part5,part6,TrailSmokeObj,NosePairObj; | |
| publicTransformsmokePoint1,smokePoint2,smokePoint3,smokePoint4; | |
| publicGameObject[]path; | |
| publicGameObjectpayLoad1,payLoad2; | |
| publicfloatHeavyBoosterReaseTime=5f,Part3ReleaseTime=30f,NosePairEjectTime=20f; | |
| publicfloatFinalStageReleaseTime; | |
| publicintcurrentwayPointId; | |
| publicfloatreachDistance=1.0f; | |
| publicfloatrotationSpeed=5.0f; | |
| publicfloatSpeedFactor=1.5f; | |
| publicfloat_time=-5; | |
| publicTextT_cntdwn; | |
| Vector3last_position; | |
| Vector3current_position; | |
| privateboolisSpeedStop; | |
| publicfloatwinTime; | |
| // Use this for initialization | |
| voidStart() | |
| { | |
| _time=-5; | |
| tr=GetComponent<Transform>(); | |
| //StartCoroutine (BreakIt ()); | |
| last_position=transform.position; | |
| T_cntdwn.text="T - "+Mathf.Floor(_time); | |
| checkCam=false; | |
| checkfinalcam=false; | |
| part12X=false; | |
| part3X=false; | |
| part4X=false; | |
| noseX=false; | |
| //pressButton.interactable = false; | |
| } | |
| // Update is called once per frame | |
| voidFixedUpdate() | |
| { | |
| //T += Time.deltaTime; | |
| if(isSpeedStop)return; | |
| _time+=Time.deltaTime; | |
| stringss=" T "; | |
| if(_time<0) | |
| ss+=Mathf.Floor(_time); | |
| else | |
| { | |
| ss+=" + "; | |
| ss+=Mathf.Floor(_time); | |
| } | |
| T_cntdwn.text=ss; | |
| if(_time<0) | |
| return; | |
| LaunchGrace(); | |
| if(_time>=HeavyBoosterReaseTime&&!part12X) | |
| { | |
| part12X=true; | |
| //pressButton.interactable = true; | |
| part1.GetComponent<Rigidbody>().isKinematic=false; | |
| part2.GetComponent<Rigidbody>().isKinematic=false; | |
| part1.transform.parent=null; | |
| part2.transform.parent=null; | |
| smokeTrail1.SetActive(false); | |
| smokeTrail2.SetActive(false); | |
| } | |
| if((_time>(HeavyBoosterReaseTime+2)&&_time<(NosePairEjectTime-2))|| | |
| (_time>(Part3ReleaseTime+2)&&_time<(FinalStageReleaseTime-10))|| | |
| (_time>(NosePairEjectTime+2)&&_time<(Part3ReleaseTime-2))) | |
| { | |
| Debug.Log("entered"); | |
| if(!checkCam) | |
| { | |
| checkCam=true; | |
| Vcam1.SetActive(false); | |
| Vcam2.SetActive(true); | |
| Debug.Log("camera2"); | |
| } | |
| } | |
| else | |
| { | |
| if(!checkfinalcam) | |
| { | |
| Vcam1.SetActive(true); | |
| Vcam2.SetActive(false); | |
| checkCam=false; | |
| // Debug.Log("camera1"); | |
| } | |
| } | |
| if(_time>=Part3ReleaseTime&&!part3X) | |
| { | |
| part3X=true; | |
| //Debug.Log (_time); | |
| part3.GetComponent<Rigidbody>().isKinematic=false; | |
| TrailSmokeObj.transform.position=smokePoint2.position; | |
| part3.transform.parent=null; | |
| smokeTrail3.SetActive(false); | |
| smokeTrail4.SetActive(true); | |
| } | |
| if(_time>=NosePairEjectTime&&!noseX) | |
| { | |
| noseX=true; | |
| //Debug.Log (_time); | |
| NosePairObj.GetComponent<NosePairEjector>().EjectNow=true; | |
| // timeM.DoSlowMotion(); | |
| NosePairObj.transform.parent=null; | |
| } | |
| if(_time>=FinalStageReleaseTime&&!part4X) | |
| { | |
| part4X=true; | |
| part4.GetComponent<Rigidbody>().isKinematic=false; | |
| //part.GetComponent<Rigidbody>().isKinematic = false; | |
| part4.transform.parent=null; | |
| //part2.transform.parent = null; | |
| smokeTrail4.SetActive(false); | |
| //smokeTrail2.SetActive(false); | |
| } | |
| if(_time>0) | |
| { | |
| SpeedFactor+=0.01f*Mathf.Log10(_time); | |
| //Debug.Log (SpeedFactor + " " + _time); | |
| speed+=SpeedFactor*Time.deltaTime; | |
| } | |
| if(_time>winTime) | |
| { | |
| WinStopSpeed(); | |
| } | |
| } | |
| voidWinStopSpeed() | |
| { | |
| isSpeedStop=true; | |
| payLoad1.SetActive(false); | |
| payLoad2.SetActive(true); | |
| checkfinalcam=true; | |
| Vcam2.SetActive(false); | |
| Vcam3.SetActive(true); | |
| // WinPanel.SetActive(true); | |
| } | |
| privatevoidLaunchGrace() | |
| { | |
| //Debug.Log ("Speed = " + speed); | |
| transform.Translate(speed*transform.right*(-1)*Time.deltaTime); | |
| ApplySuperCurve(); | |
| ApplyLowCurve(); | |
| //tr.Translate (0, speed * Time.deltaTime, 0); | |
| } | |
| voidApplySuperCurve() | |
| { | |
| if(10<=_time&&_time<=25) | |
| { | |
| // Debug.Log("Super Curving"); | |
| transform.Rotate(newVector3(0,1,0),2f*Time.deltaTime,Space.Self); | |
| } | |
| } | |
| voidApplyLowCurve() | |
| { | |
| if(25<=_time&&_time<=35) | |
| { | |
| transform.Rotate(newVector3(0,1,0),1*Time.deltaTime,Space.Self); | |
| } | |
| } | |
| privateIEnumeratorBreakIt() | |
| { | |
| yieldreturnnewWaitForSeconds(HeavyBoosterReaseTime); | |
| part1.GetComponent<Rigidbody>().isKinematic=false; | |
| part2.GetComponent<Rigidbody>().isKinematic=false; | |
| part1.transform.parent=null; | |
| part2.transform.parent=null; | |
| } | |
| privatevoidFollowPath() | |
| { | |
| floatdistane=Vector3.Distance(path[currentwayPointId].transform.position,transform.position); | |
| transform.position=Vector3.MoveTowards(transform.position,path[currentwayPointId].transform.position,speed*Time.deltaTime); | |
| varrotation=Quaternion.LookRotation(path[currentwayPointId].transform.position-transform.position); | |
| transform.rotation=(Quaternion.Slerp(transform.rotation,rotation,Time.deltaTime*rotationSpeed)); | |
| if(distane<=reachDistance) | |
| { | |
| currentwayPointId++; | |
| } | |
| } | |
| publicvoidBackToMainMenu() | |
| { | |
| //SceneManager.LoadScene("Menu"); | |
| } | |
| } |